登录
首页
变频器论坛
施耐德电气变频器论坛
回帖
发帖
正文
主题:∞光分享∞057:M2X8与ATV303 的modbus通信
点击:831 回复:2
楼主
编辑
引用
管理
0aguang0
本贴内容来自<120例>1.5.5章节
这个案例挺好用的
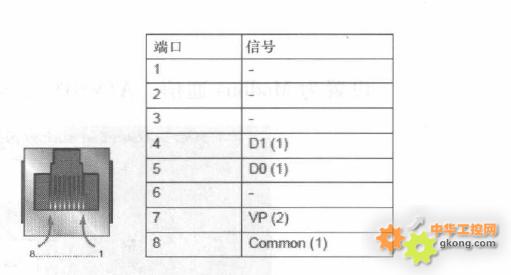
ATV303通信端口定义如图
M2X8与ATV303的通信接线:
D1........4
D0........5
GND.......8
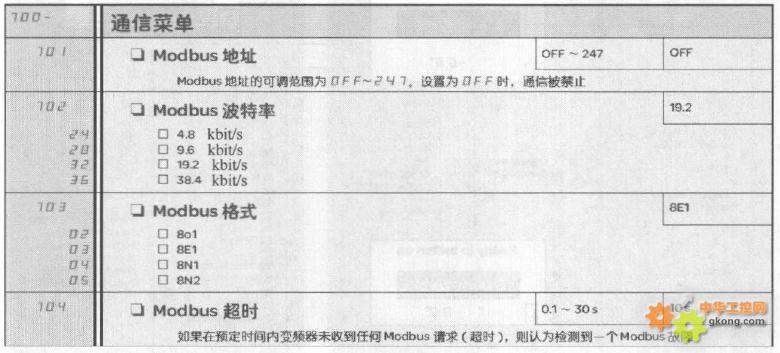
ATV303通信参数设置如图
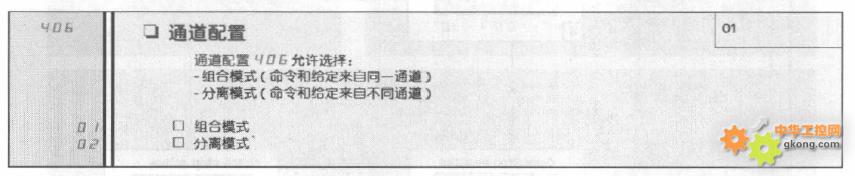
设置MODBUS通信参数,并对ATV303进行重启后通信参数生效,设置为分离模式
设置命令通道
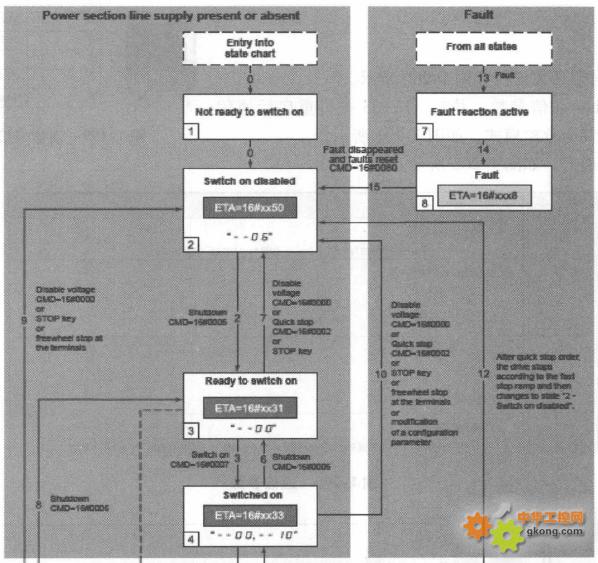
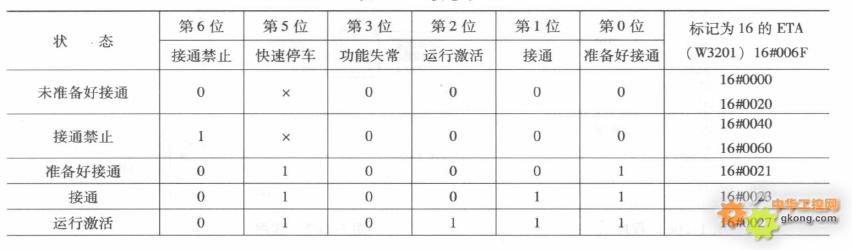
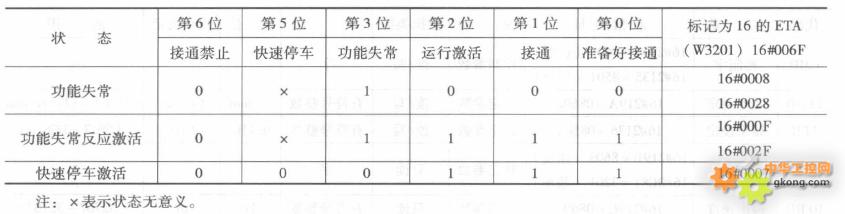
设置为modbus通信.ATV303的通信控制流程必须准寻DRIVECOM流程如下图
这个图很重要.基本所有的ATVmodbus通讯都是这个流程,挺闹心的
后来高级点的ATV有IO模式,,就简单多了
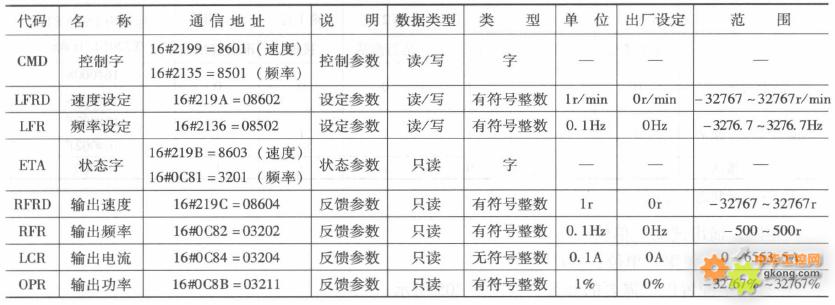
这个流程中,需要用到一下变量参数.
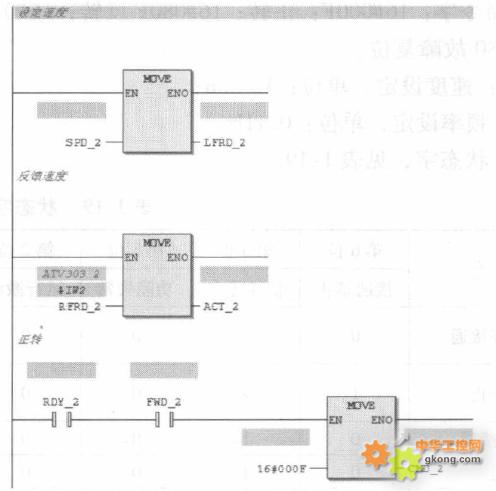
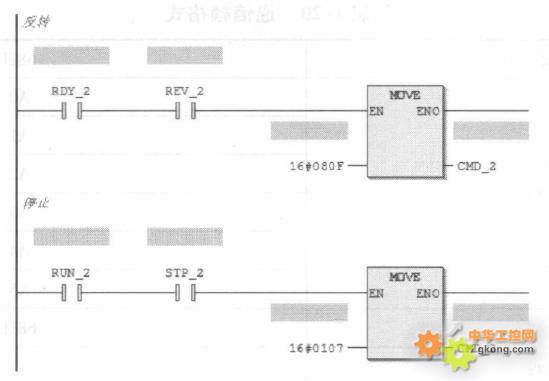
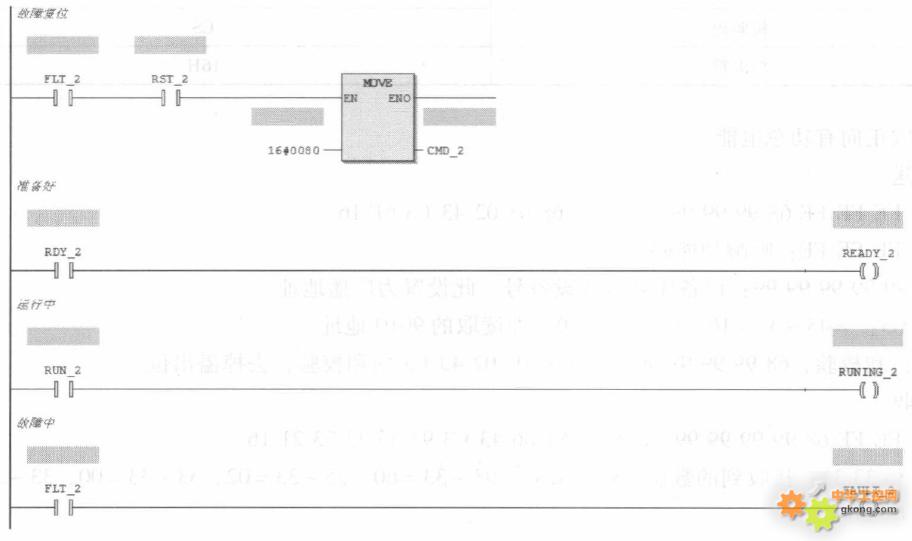
CMD:命令字
常用命令字:16#000F:正转;16#080F 反转;16#0107以设定停车方式停车;
16#0002快速停车;16#0080 故障复位.
LFRD:速度设定,单位:1r/min
LFR:频率设定,单位:0.1Hz
ETA:状态字
RFRD:输出速度,单位:1r/min
RFR:输出频率,单位:0.1Hz
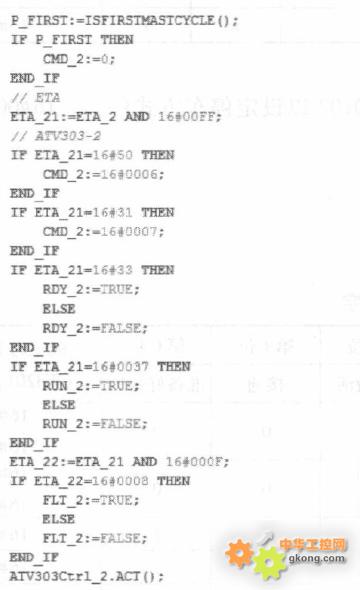
在程序中配置以上需要的参数.
程序图与例程下载在楼下.
19-11-23 23:00
1楼
编辑
引用
管理
0aguang0
程序截图
例程文件
附件:
[
本地下载
]
19-11-23 23:02
2楼
编辑
引用
管理
AUTOSYS168
学习了
19-11-26 22:25
工控新闻
倍福 | 基于 Linux® 的实时控制 — 现在也可用作虚拟 PLC
人形机器人量产前夕 众擎把造价打到10万元内
汇川技术&北京东城区政府签订汇川集团北方总部项目合作协议
我国工业领域设备更新加速落地
节卡机器人超A新品,CNC上下料作业之王!
锚定中东乘势出海,侨交会迪拜展吹响集结号
工信部发布“5G+工业互联网”融合应用试点城市名单
对冲基金巨头Elliott督促霍尼韦尔进行拆分
更多新闻资讯