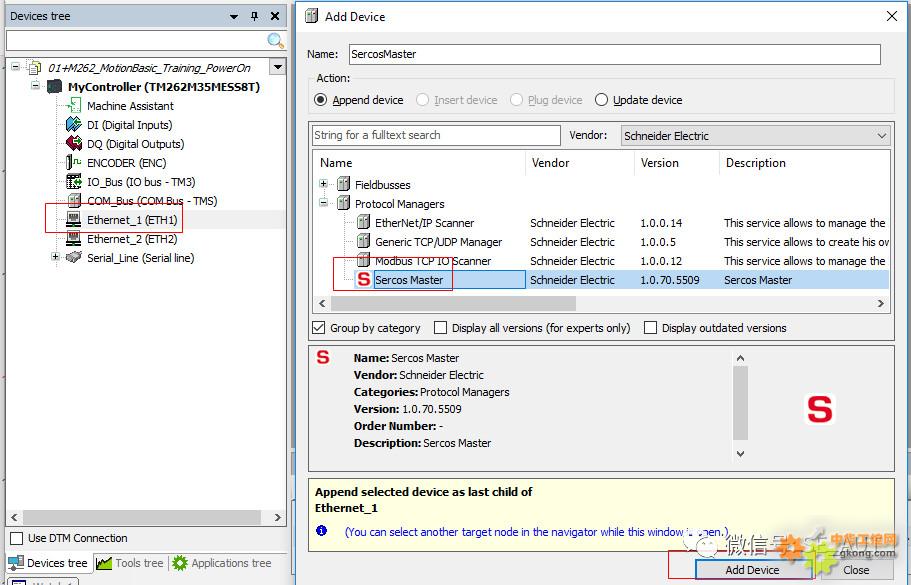
系统构架是这个样子滴:

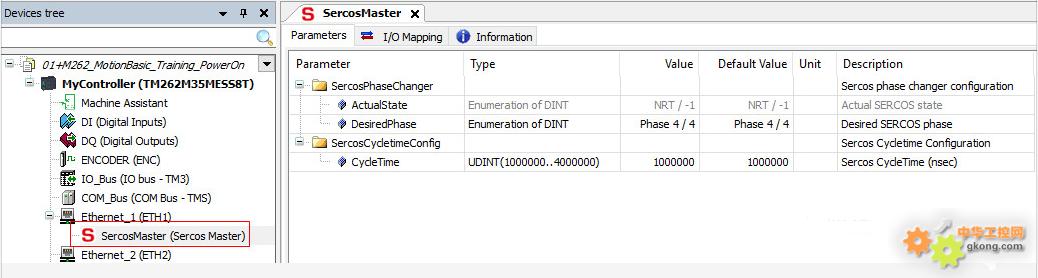
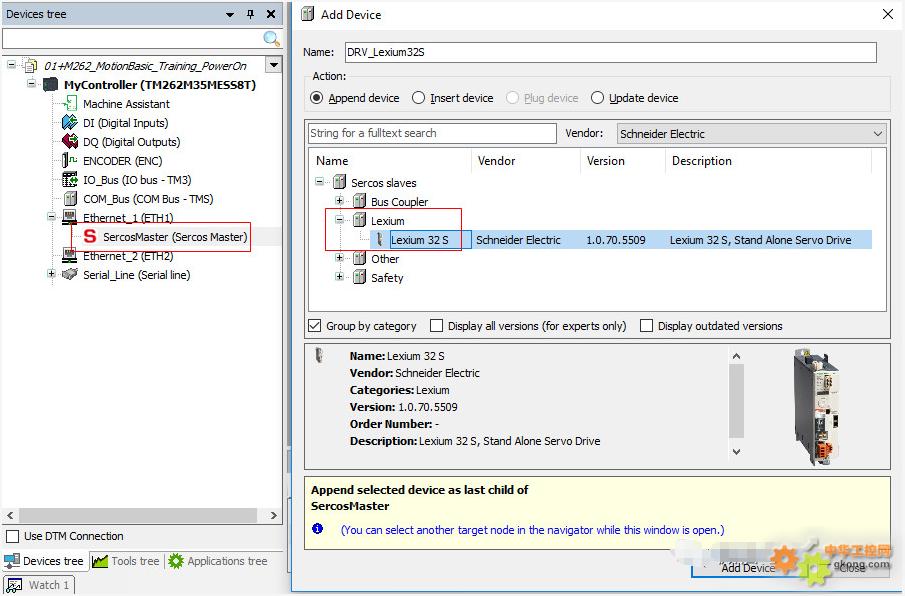
1、右键"Ethernet_1"添加设备,选择"Sercos Master";
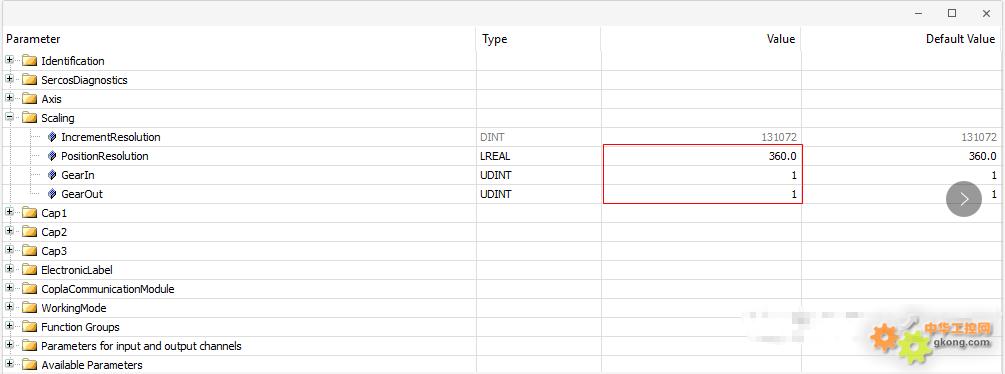
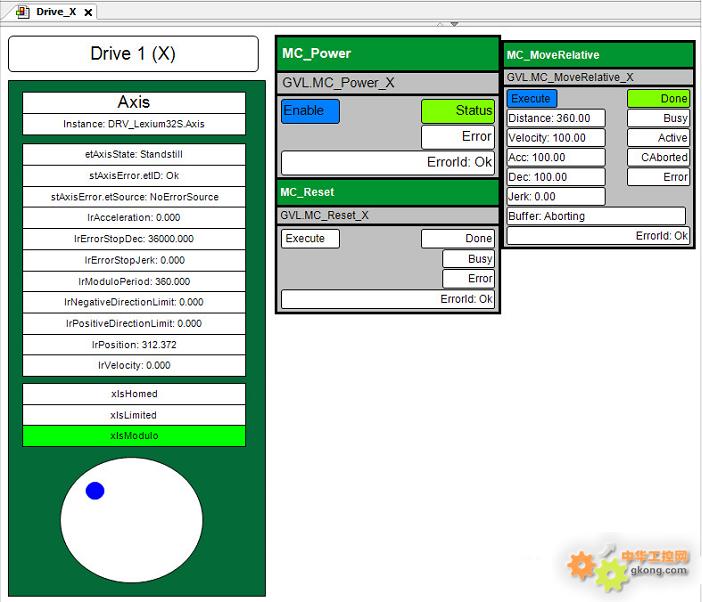
如有修改齿轮比,则对应:
PositionResolution*(GearIn/GearOut)个用户单位转一圈;
举例:
PositionResolution=360,
GearIn=2
GearOut=1,
则:
360*(2/1)=720
给定720个用户单位电机转一圈;
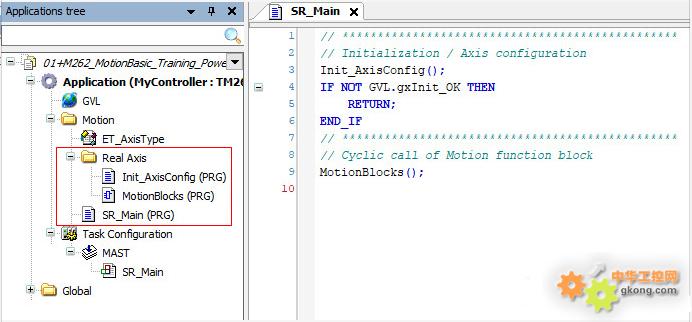
编写程序:
1、初始化
Sercos通信状态机
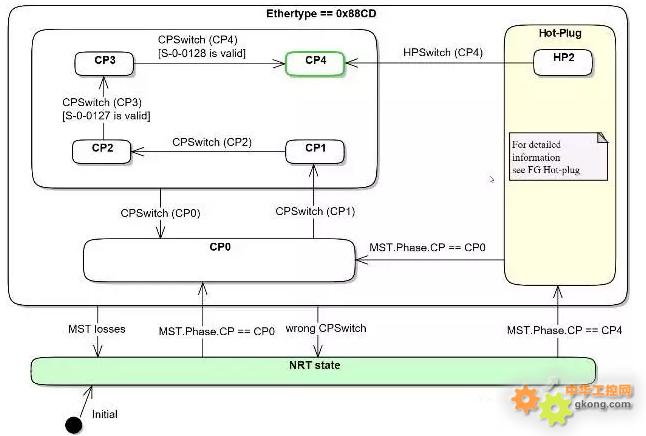
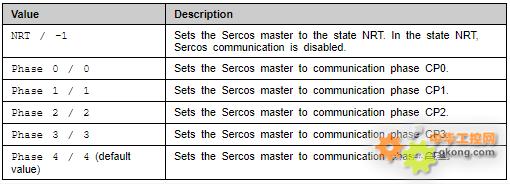

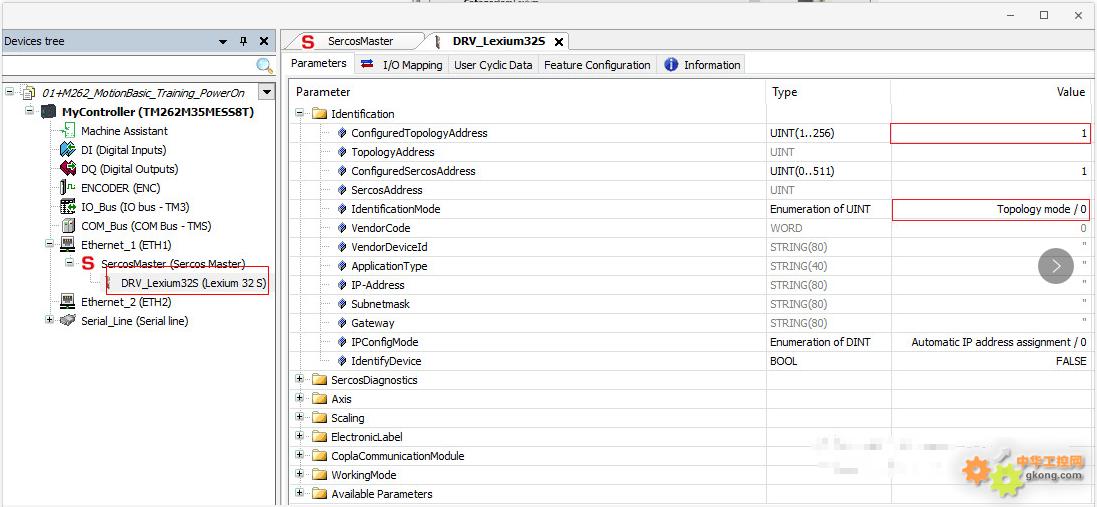
如果需要在程序中初始化轴配置,如Scaling,AxisType,position period等,必须在状态切换为4之前进行配置;
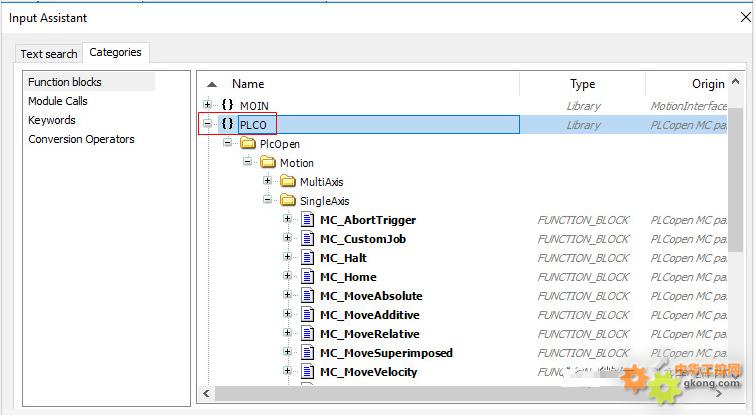
2、调用PLCO库中的运动功能块
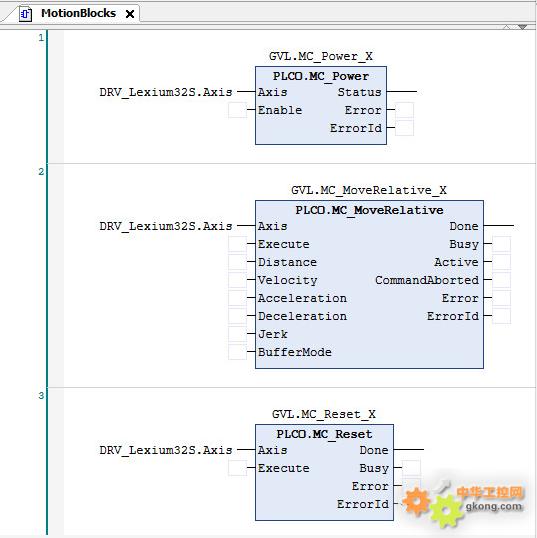
1、DRV_Lexium32S为组态时添加伺服的名称,必须取其Axis变量接入功能块Axis管脚,轴名称也可自行更改;
2、若功能块的实例在GVL全局变量中声明,调用时必须加前缀GVL;
3、完整程序结构如下: