下面我拿个具体实例来说明,光讲理论探讨有点扯淡,也有点深奥,毕竟我们还是要应用为主实战为主;
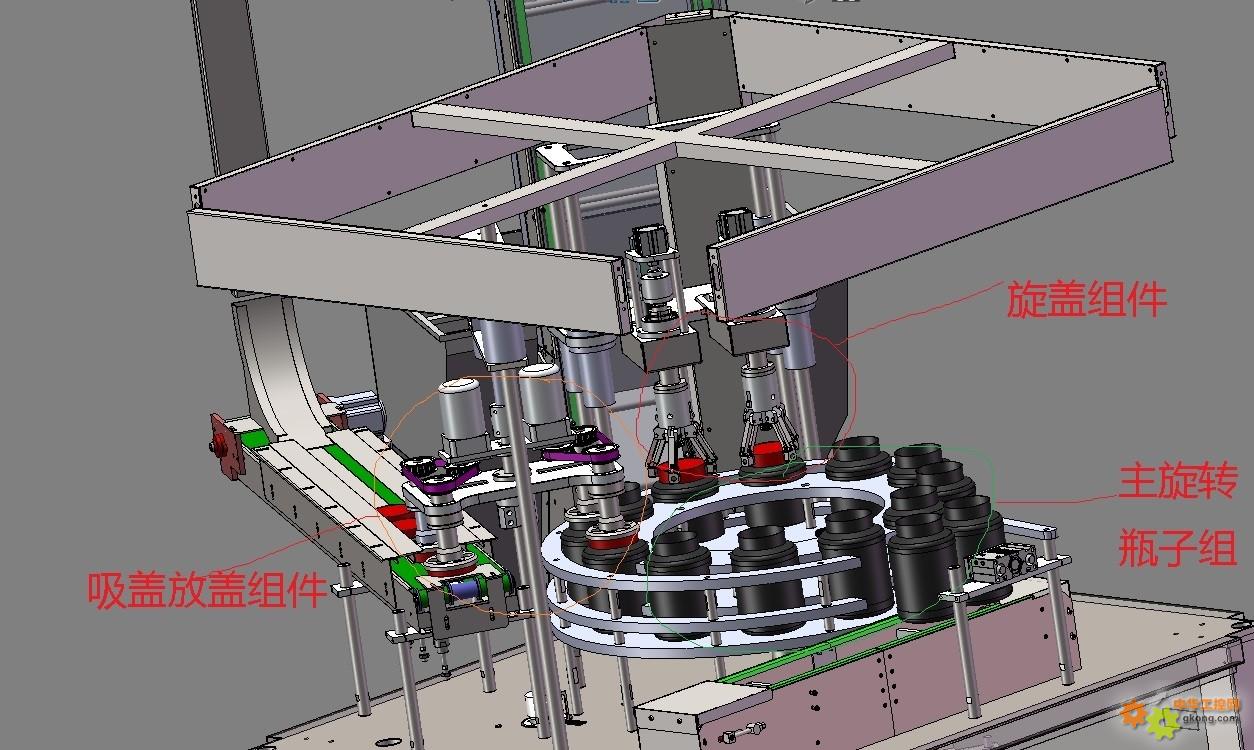
实际设备:旋盖机,功能,给旋转平台上的瓶子旋盖。
设备3大组件:
1。主轴旋转盘组件;
负责实现瓶子的上料和旋转,一次旋转某个角度(比如30度)
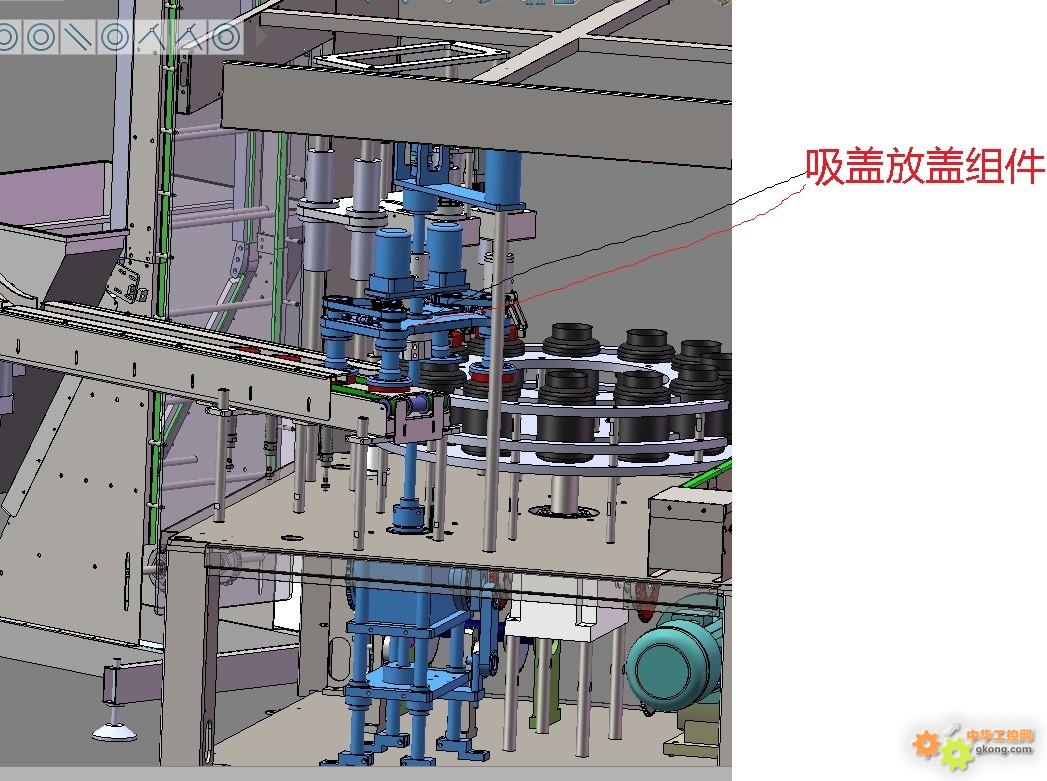
2.吸盖和放盖组件
负责吸取盖子并放置到瓶子上面;
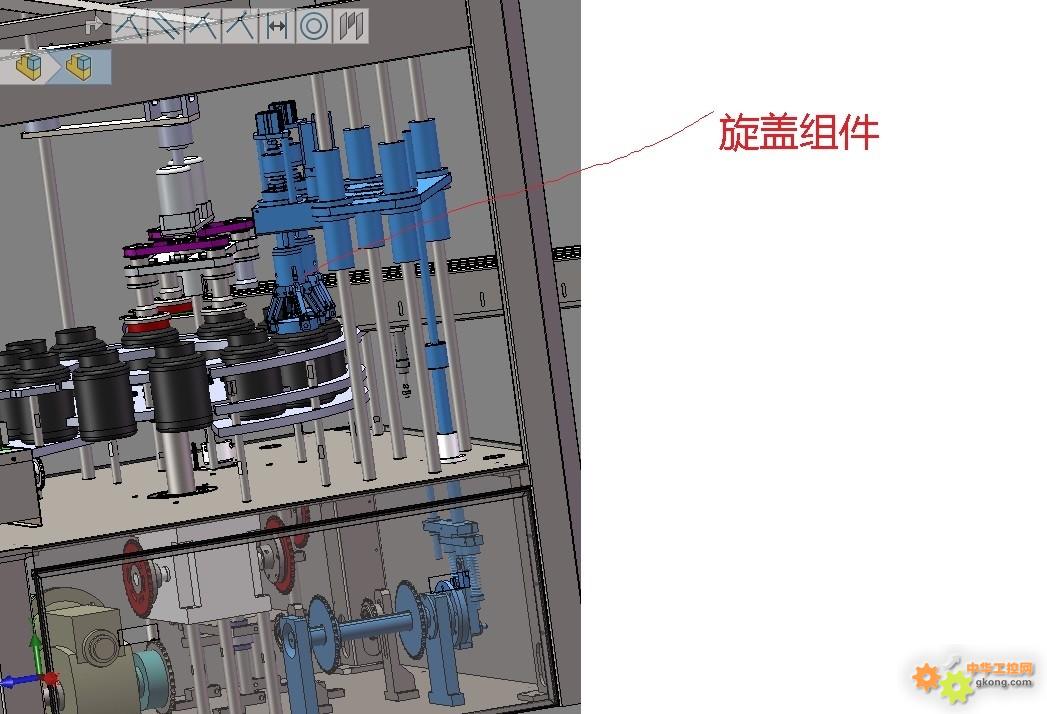
3.旋盖组件
负责把瓶子上的盖子旋紧;
运动分析:
1. 主轴旋转盘组件每次旋转30度,3秒实现。然后停止3秒。再次3秒旋转30度停止3秒;
2. 吸盖组件包含上下运动和自身旋转运动
上下移动距离是0-60MM,每次转动角度180度。
3. 旋盖组件
只有上下运动,运动范围0-100MM; 旋盖运动由独立伺服控制夹具不在讨论范围。
最终功能要求
1. 转盘每次转动30度移动到吸盖放盖组件下面,停止的3秒内一定要
完成下降60MM放盖动作,同时另一侧完成吸盖动作; 转台转动的3秒内要吸盖放盖组件
完成上升60MM旋转180度动作;
2. 转盘每次转30度的3秒内,旋盖组件要完成上升100MM动作;
转台停止的3秒内,旋盖组件要完成下降100MM动作;
功能就这3大块
1. 主旋转瓶子组 : 主电机+凸轮分割器 间歇旋转带动大转盘,实现瓶子旋转到所需工位;
这个组属于一级机械传动: 主电机+减速机+链条传动+凸轮分割器1+凸轮分隔器输出轴旋转大转盘
2. 吸盖放盖组 : 抓手下内置吸盘,抓手盘的转动和上下移动由主电机经过多级机械传动而来
这个组属于 : 主电机+减速机+链条传动+凸轮分割器1+链条传动+链条传动+凸轮分割器2输出轴实现抓盘转动
主电机+减速机+链条传动+凸轮分割器1+链条传动+链条传动+凸轮分割器2输出轴+连杆机构实现吸盖放盖抓盘上下运动
3. 旋盖组: 抓手自身的独立旋转运动由独立的伺服控制不在讨论范围;而 抓手所在的盘整体上下运动由主电机经过多级机械传动而来。 这个运动是我们需要讨论的;
这个组属于 : 主电机+减速机+链条传动+凸轮分割器1+链条传动+链条传动+连杆机构 实现旋盖抓盘上下运动
一个主电机通过机械传动实现了主轴的角度控制+吸盖放盖组轴的上下移动和旋转角度控制+旋盖组轴的上下移动控制;
典型的一个主轴+2根从轴的运动控制,并且还是机械传动实现的,只有一个动力源就是主3相异步电机,其余的链条,凸轮分隔器,连杆机构等都是机械传动,与电气技术无关。
1. 一个设计问题: 这样的机械传动机构如何设计?
2.一个调试问题: 你有机械0点的概念吗? 这台设备的机械0点你清楚吗? 你的设备有机械0点吗?
这台设备的机械0点就是旋盖组的连杆轴处于最低端0MM处+主轴电机0角度+吸盖放盖组的连杆轴处于最低端0MM处,角度位置0角度处。
处理不好会有后果:
1.机械设计把握不好,主电机转了一圈,主轴转盘也转了30度,旋盖连杆轴没有实现从0到100MM的移动距离;或者吸盖放盖组轴没有完成180度旋转,没有实现0到60MM移动;
2. 没有理解机械0点,装配调试会出现,主轴处于0度时,主转盘也是0度,但是两个连杆轴却不在对应的位置高度;
这个案例让我不得不思考
1. 怎么设计机械传动式主从轴运动控制?
2.机械0点。
欢迎大家讨论,指正指点,谢谢