
YAMAHA机器人的速度指令我都已经设置为100%,为什么速度还这么慢呢
SPEED 100
ASPEED 100
ACCEL 100
DECEL 100

程序的执行速度有两个,一个是编程速度,一个是速度倍率。
公式如下:
1、关节动作的执行速度=关节最大速度(关节最大速度由系统变量控制)×编程速度×速度倍率
2、其余动作的执行速度=编程速度×速度倍率
公式如下:
1、关节动作的执行速度=关节最大速度(关节最大速度由系统变量控制)×编程速度×速度倍率
2、其余动作的执行速度=编程速度×速度倍率
18-08-27 17:35

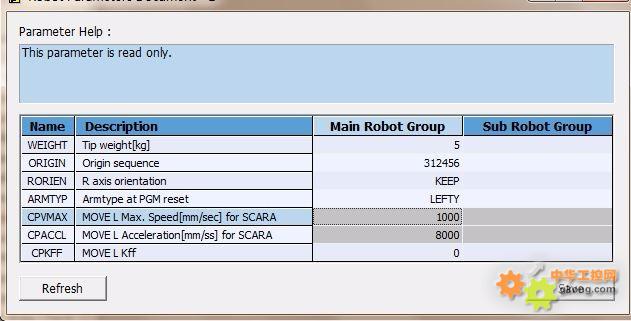
这个里面的CPVMAX参数才是1000,无法修改,但是YK400XG里面的标注的最大速度参数为6.1m/sec,是否是这个参数read only参数制约了手臂速度的提升呢,谢谢![附件 YMH.jpg]()
18-08-28 13:12