問題
原來狀態-- 原點時, X軸到 DOG ON, 再持續行走 約5mm,停止(DOG仍ON)
現況--- 原點時, X軸到 DOG ON ,再持續行走 約10mm,停止(DOG仍ON)
檢查參數,沒有改變過, DOG 是正常會亮的
原因--- 未知??
對策---- 原點改為 DOG ON後,回頭移動到 DOG OFF ,
正常動作
另外X移動會跑過頭,這很特別約3~5mm
請教 有人知道原因嗎? 或是可以討論看看,
感謝~~
17-09-19 17:53

20gm可以这DOG块设置原点,然后还有一个参数可以设置为电气零点的,有没有可能是这个电气零点的问题,还有就是如果DOG块一直ON的状态,是不是用的伺服编码器的零位脉冲作为回零点的标志的。如果是 这样的话,有没有可能是零位脉冲有问题
17-09-20 08:28

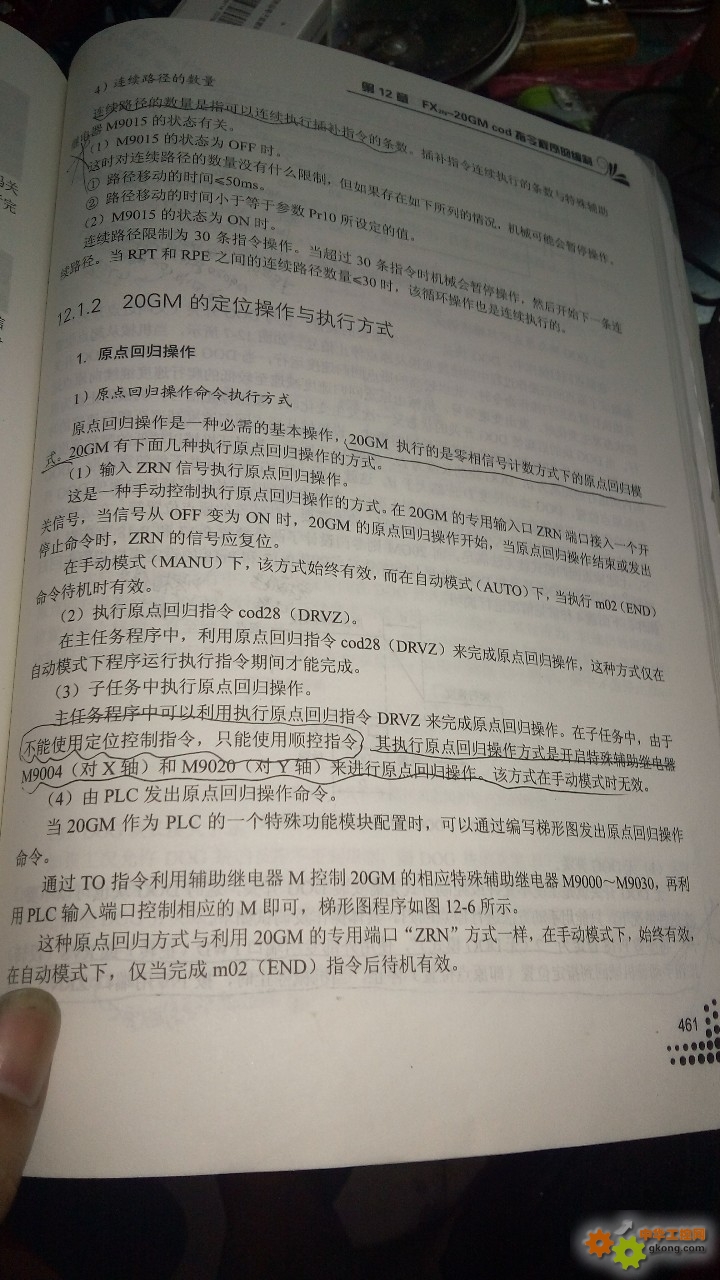
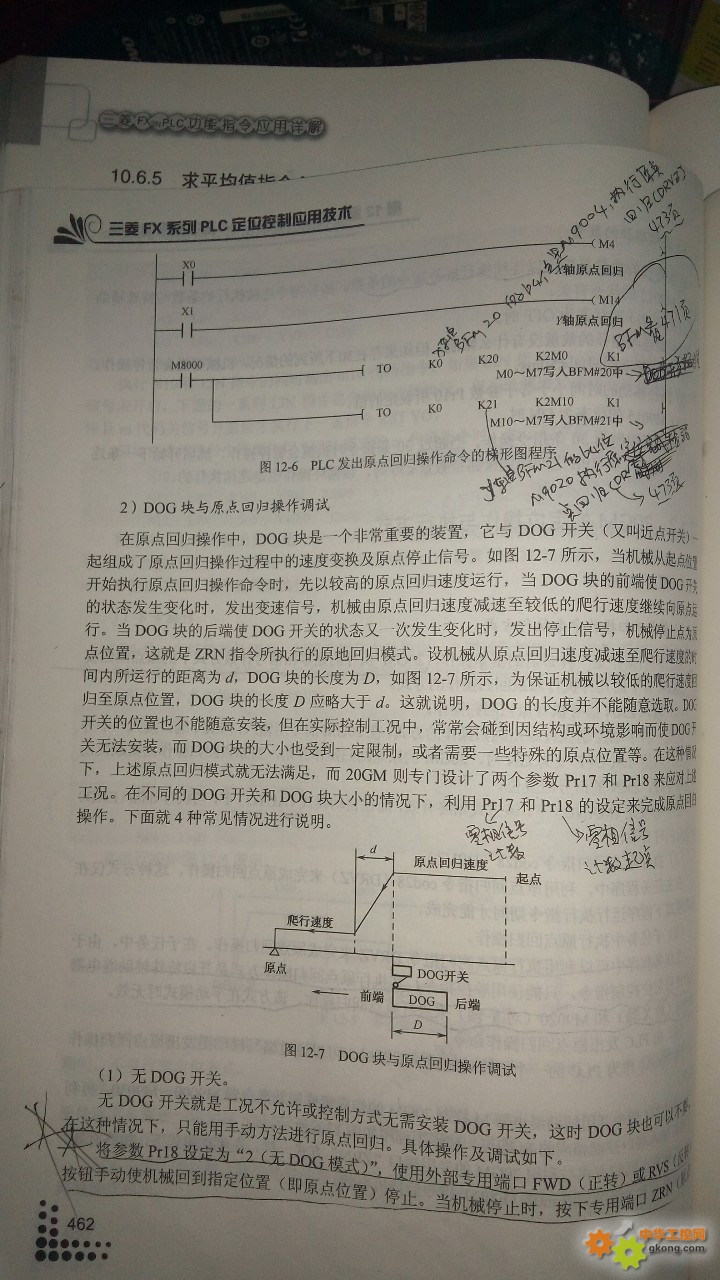
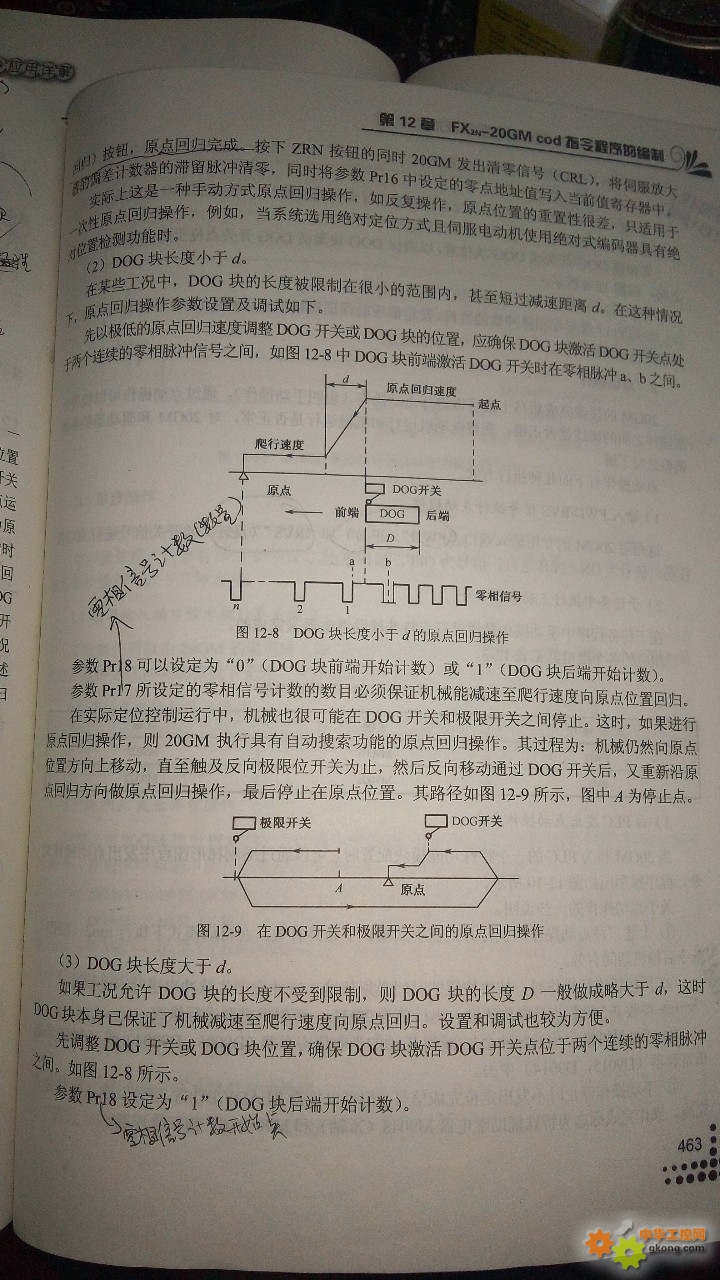
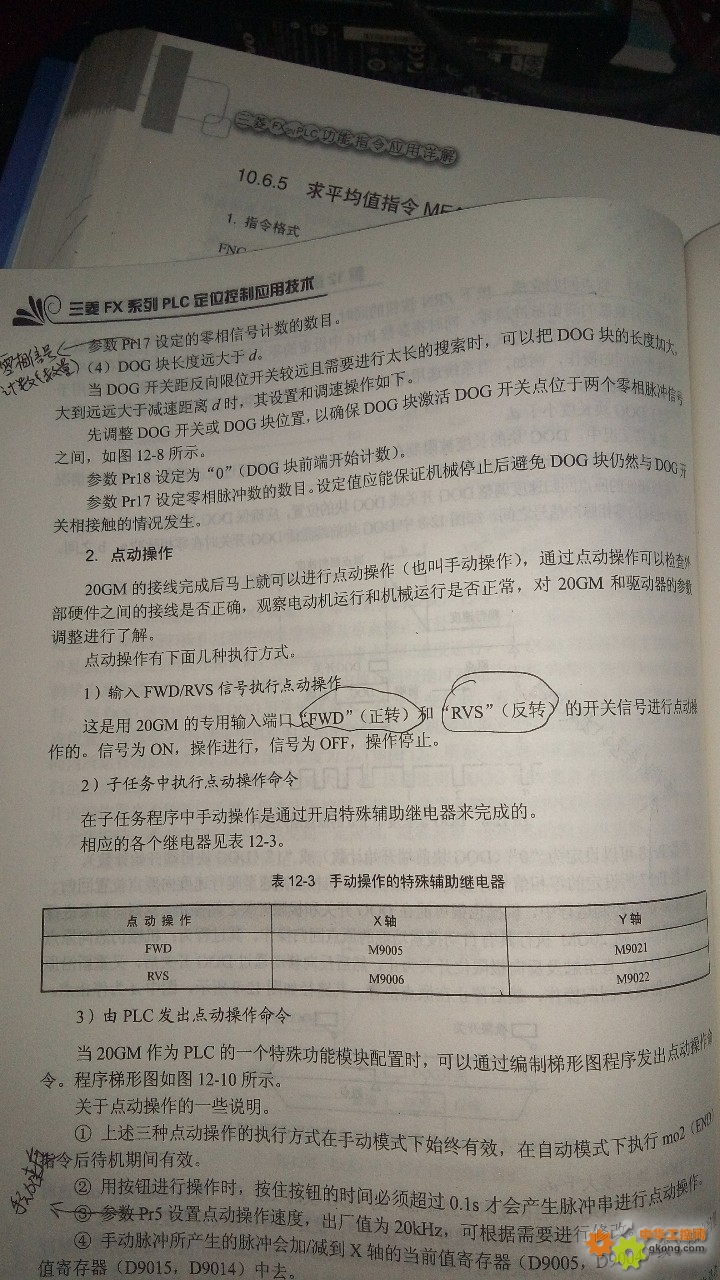
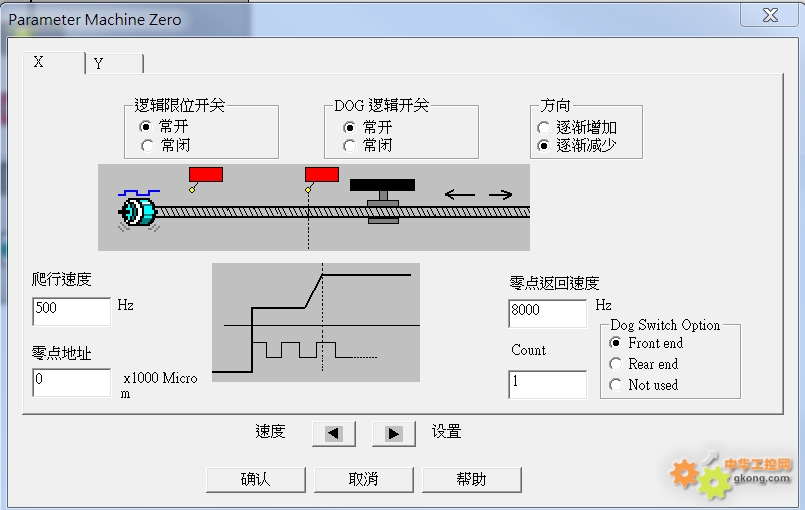
零相信号计数是DOG开关由ON变OFF时的开始对零相信号计数,达到设定值运行停止,你的DOG开关怎么还ON?参数18:零相信号计数开始点 PR18=0,近点块前端:前端使DOG开关由OFF变为ON开始计数。 PR18=1:近点块后端使DOG开关由ON变OFF开始计数。 PR18=2,不用:不使用近点块!当PR17零相信号计数为0时和PR18=0时,DOG开关一打开或者关闭,机械会在原点回归速度上突然停止,这样会造成事故,因此为保证以爬行速度回零,必须保证零相信号数的设置能在PR18=0时使回零减速至爬行速度。PR20:DOG开关逻辑设置:PR20=0,DOG开关设为常开时,应接入闭合输入,PR20=1,设定为常闭时,应接成常开输入!以上都是书上的内容!所以1:爬行速度是否合适?参数设置没问题检查机械部分是否松动或者磨损?检查编码器零相信号接线或者编码器有问题?
17-09-21 11:49
二位大哥說的沒錯,問題是解決了,但問題沒找到
推測應該是多了一個伺服編碼器的原點的問題,只是在哪設定這一個功能的地方沒有找到
解決方案,目前是用PR18=1的方式使用,增加掃瞄伺服器原點的速度,但GM上原點+伺服器0點的設定是沒有找到的
給大家做參考
![附件 1.jpg]()
推測應該是多了一個伺服編碼器的原點的問題,只是在哪設定這一個功能的地方沒有找到
解決方案,目前是用PR18=1的方式使用,增加掃瞄伺服器原點的速度,但GM上原點+伺服器0點的設定是沒有找到的
給大家做參考
17-09-24 17:32
按照楼主提供的截图,pr18=0,不是=1,front end是前端。pr16是原点,pr24是零点。带abs检测原点和零点都设为0!![附件 IMG_20170924_195825.jpg]()
![附件 IMG_20170924_195903.jpg]()
最后修改:2017/9/24 20:05:47
17-09-24 19:56