
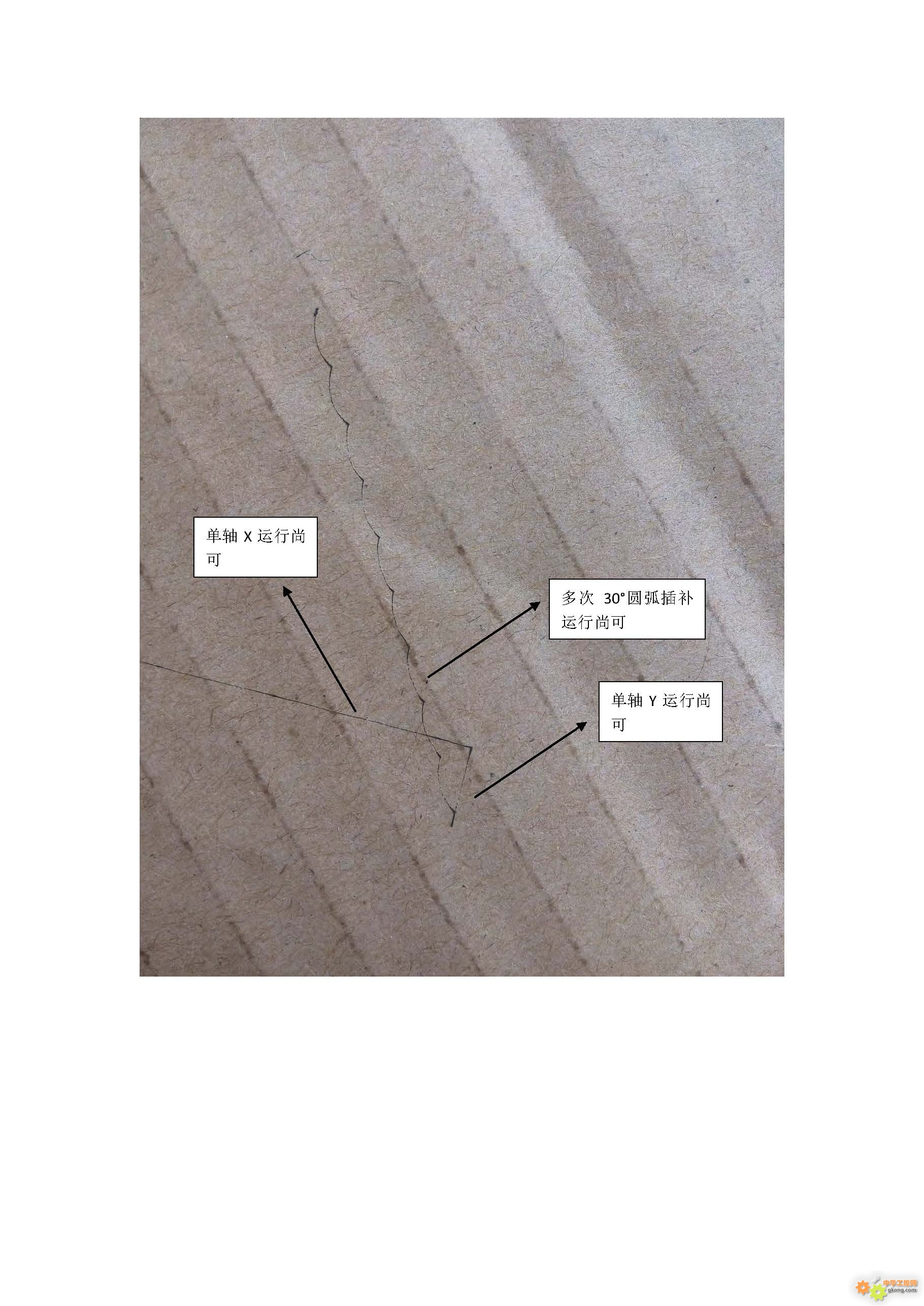
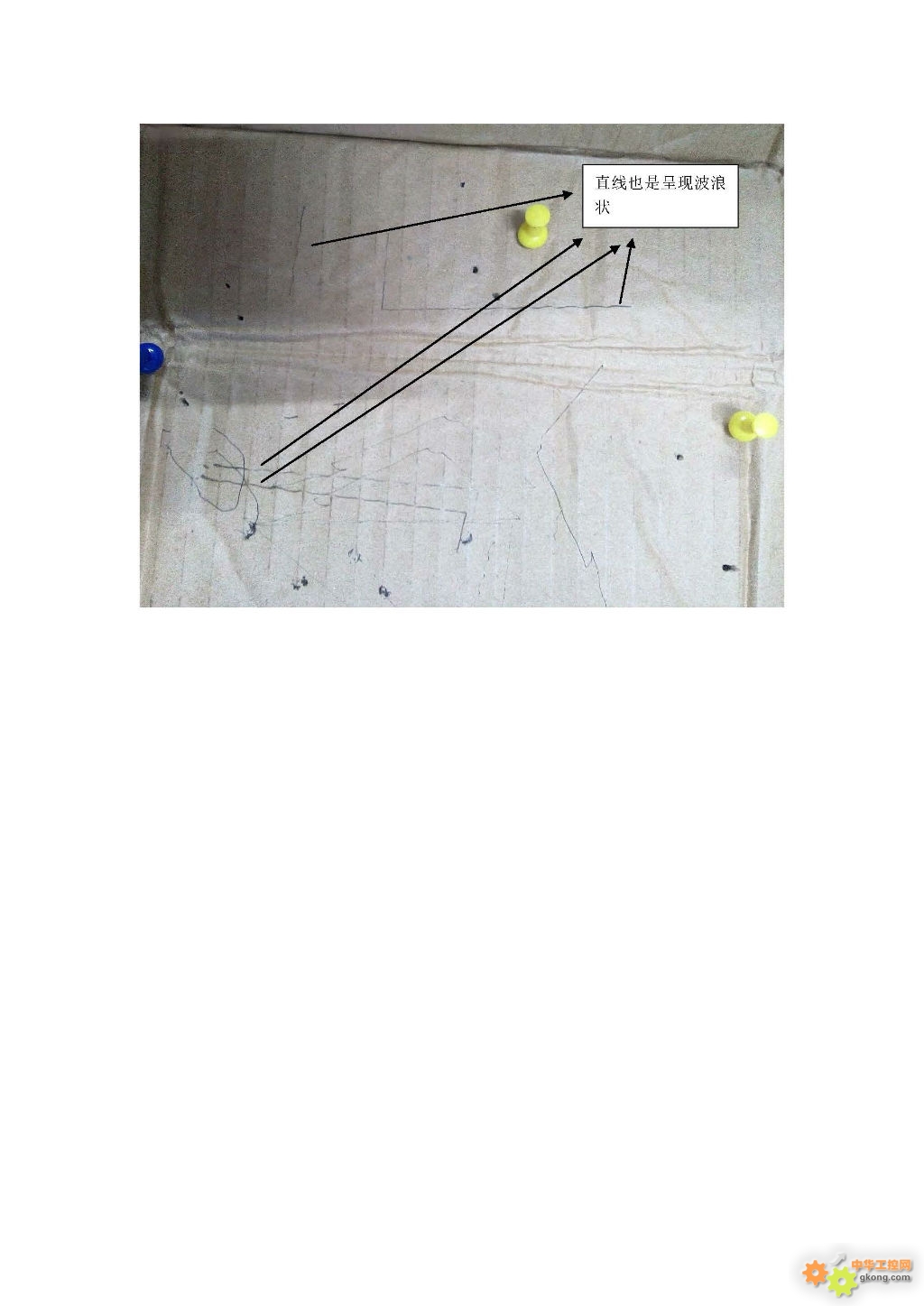
现在出现了一个问题,单轴控制都还不错,激光能划出比较平整的直线,但问题出现在双轴走直线的问题上,
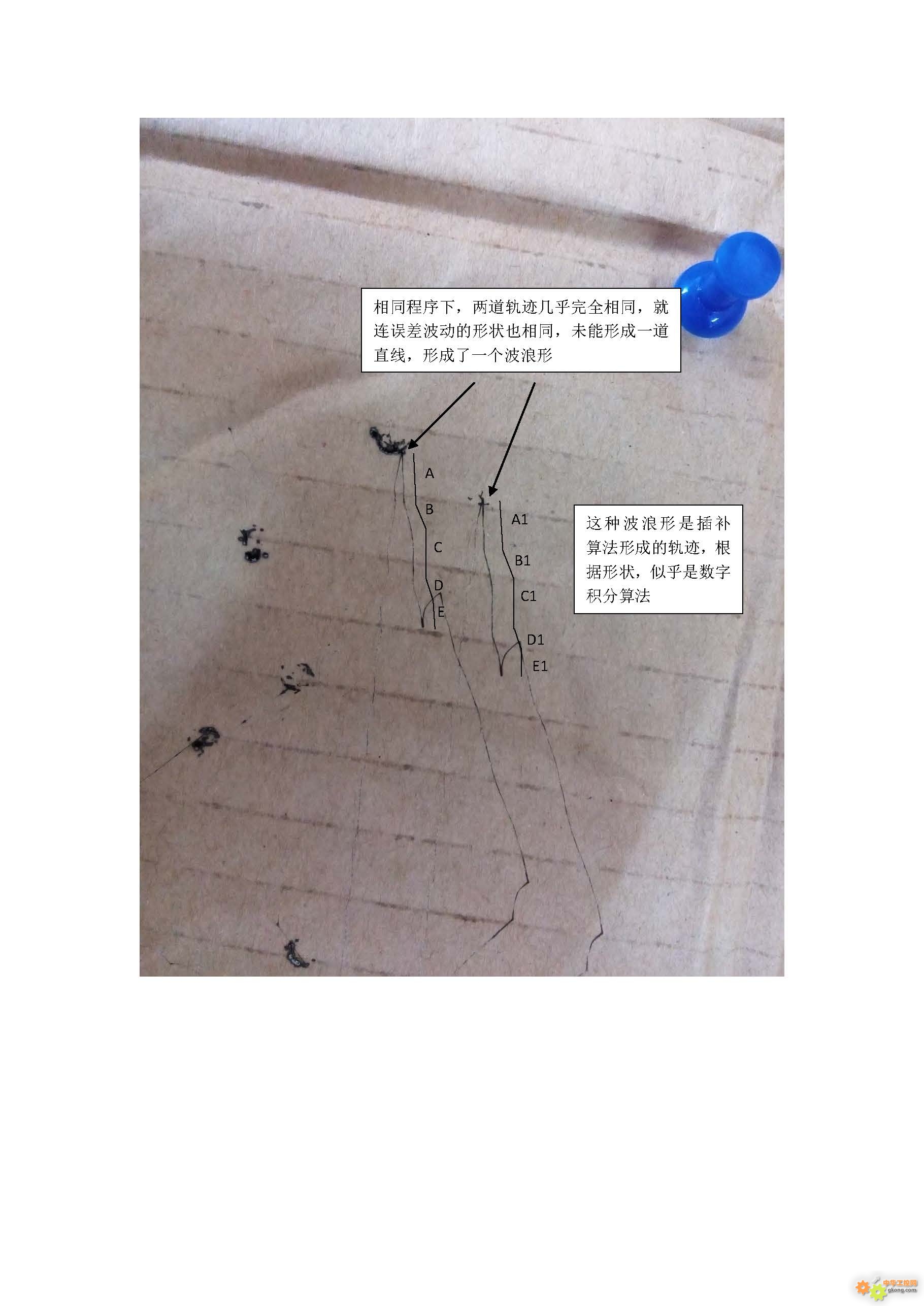
如图中所示,一开始走出来的线如同波浪一样,因为小弟自己也懂一些插补算法,这个轨迹就像是采用数字积分插补做出的轨迹的放大版,我怀疑是否是他们程序的X,Y增量设定得太大,但是我又觉得这种低级错误应该不可能发生。
那么到底又是为什么呢?
是否又是要划的轮廓太小,导致相对误差就显得很大呢?
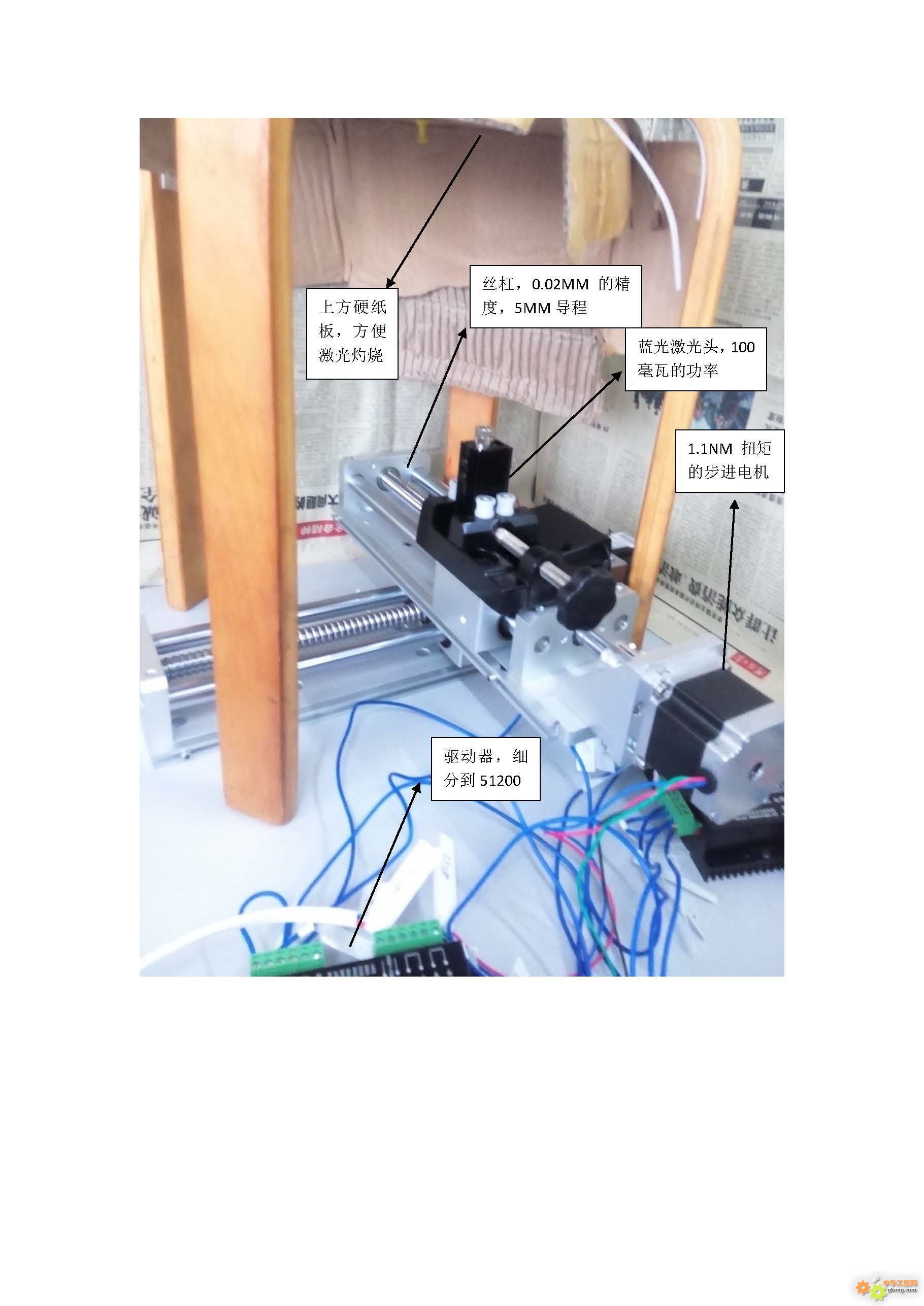
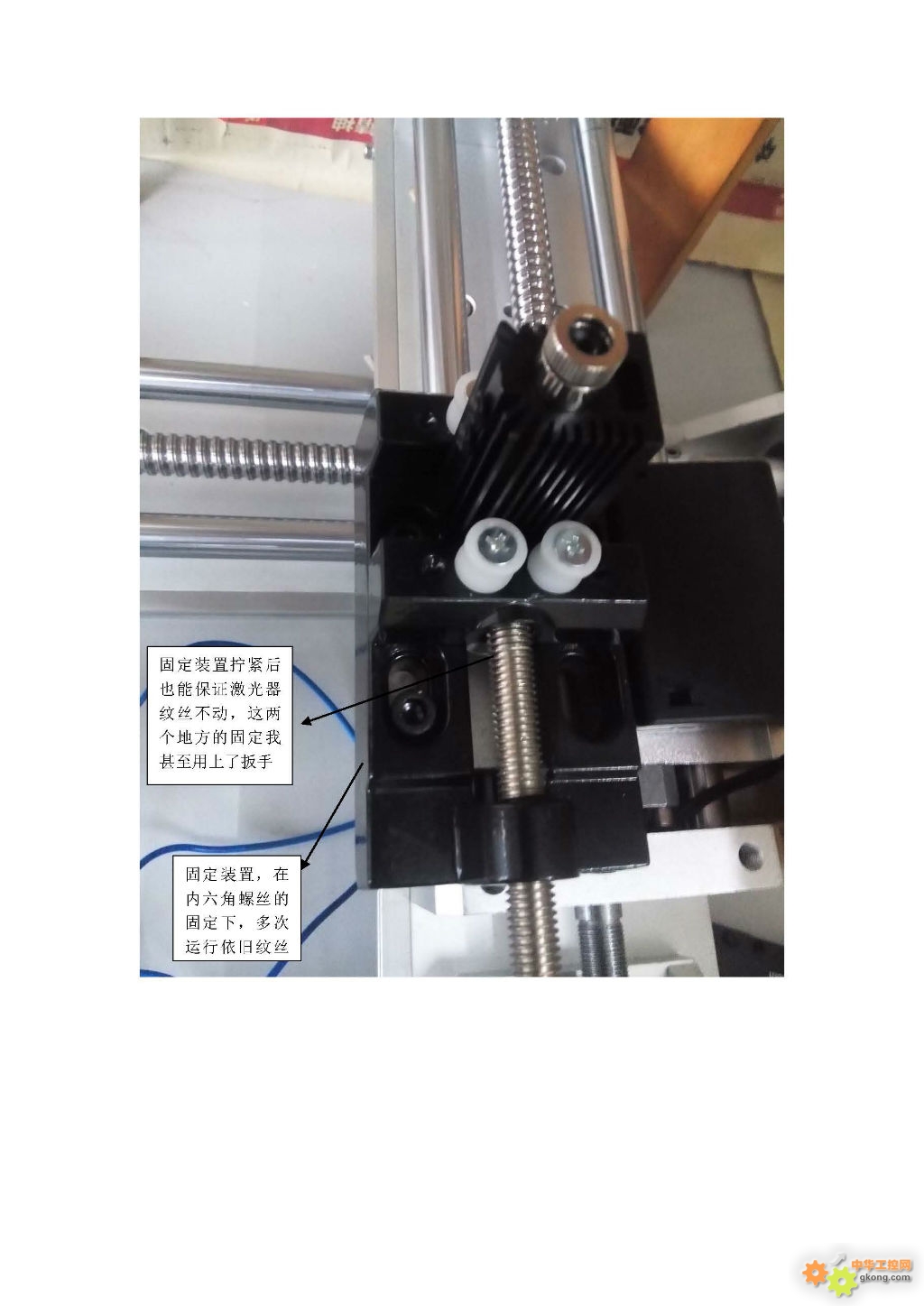
XY工作台没有加重负载,如图就只有我的激光模组和夹紧器,这两个都很轻,应该不会产生振动。
我在低速30mm/min,100mm/min,10mm/min的情况下走出来的情况几乎没有什么差别。
其电子齿轮比设定为51200/5000,即细分51200,5000为丝杠导程,步进驱动器也是相应设定
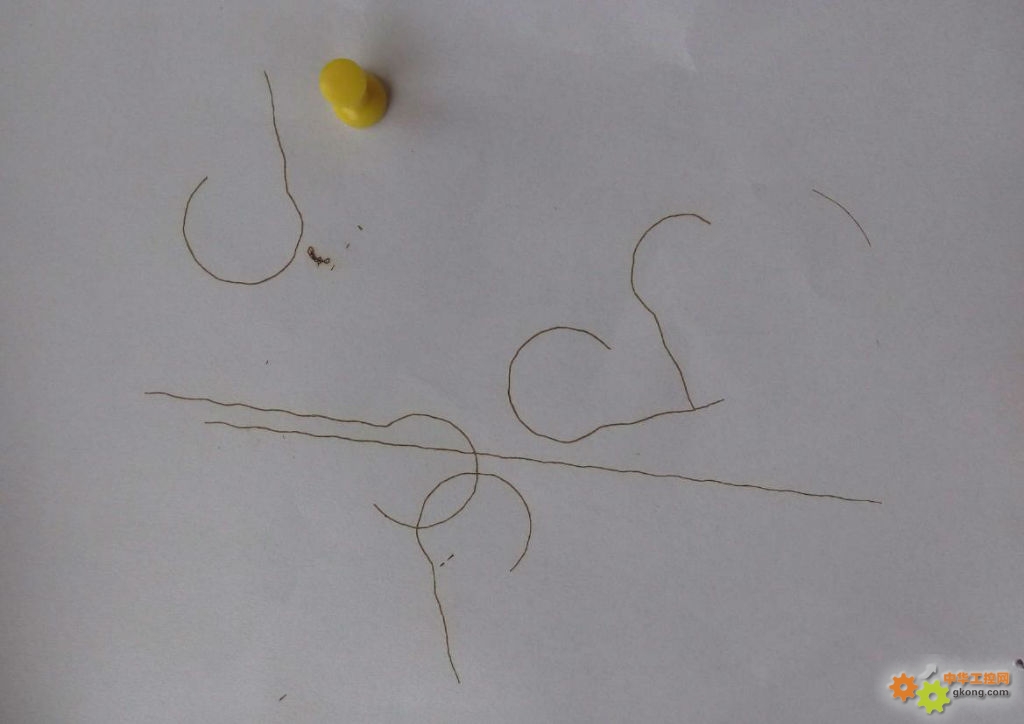
现在还发现一个问题,就是轨迹在前面很难看,但后面似乎又平整了很多,但依旧呈波浪状或者锯齿状,我有些不理解。
出现这种波动到底是为什么呢?又有什么办法可以解决呢?谢谢!
链接里我送到厂家后,他们的测试视频,感觉比起我的好上很多,我怀疑是不是因为我用激光太细了,而他们用的笔,很粗,所以就看不出这么粗糙的轨迹?
http://share.weiyun.com/53e2b54dfb0ed3a9ecc072e511e758e8
最后修改:2015/12/3 15:15:15
