
现手头有设计项目程序外包,寻求精通安川MP控制器电子凸轮和相位控制编程高手合作,本项项目外包程序费用至少2W以上,项目地址江苏苏州市,有意请与我联系。邮箱gavin.young@163.com
15-03-14 14:27
呵呵,高级货,没有机会玩呢。
安川的运动控制器,是机器人?还是加工中心?如果说单单剩下的工作是编程的话,请私人高手吧。
毕竟项目的硬件选型,硬件布线全被你们搞定了,只能按照你们的思路来实现了。
![附件 QQ截图20150314145621.jpg]()
安川的运动控制器,是机器人?还是加工中心?如果说单单剩下的工作是编程的话,请私人高手吧。
毕竟项目的硬件选型,硬件布线全被你们搞定了,只能按照你们的思路来实现了。
15-03-14 14:57

8轴中有几轴是同步的?安川的电子凸轮和相位控制属于主从轴控制关系,电子凸轮需要自己拟合凸轮曲线。期实本质还是数控中的插补。如果是多轴同步可能还要用到虚拟轴。安川MP可以进行运动程序的编写,一般的直线,圆弧,螺旋插补都有,估计你这项目中要插补的是曲线,也就是工艺中的算法,利用MATLAB可以进行曲线拟合。知道了插补曲线方程,那就可以用插补指令做哦。安川的位置,速度,转矩,相位,电子凸轮控制都没现成的模块调用,要自己编写。如果是插补曲线还可以把曲线分成小段的直线进行插补,控制好加减速哦。最好是把你项目中的工艺说说看。我们用安川MP2300S做绕线机都还不错的哦。
15-03-14 21:52
15-03-16 08:38
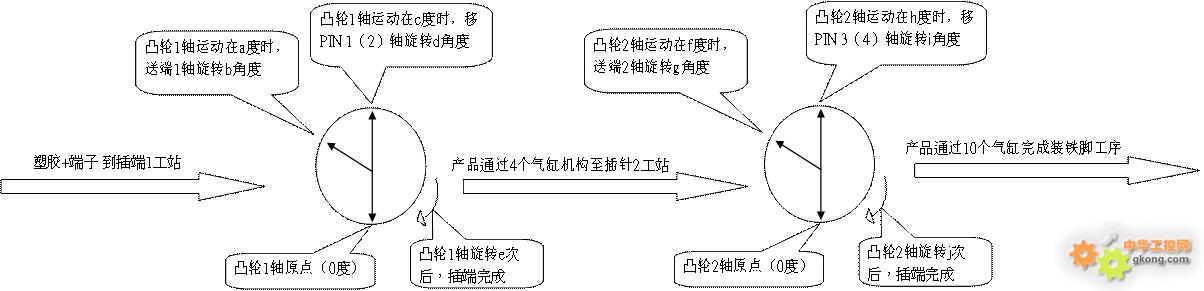
我说下我理解的大概思路吧。一开始是凸轮轴旋转;当凸轮轴到a°时送端轴跟随凸轮轴旋转b°;当凸轮轴到c°时假设虚拟轴U是主轴,PIN两轴是从轴,虚拟轴跟随凸轮轴旋转 d°。当凸轮轴旋转了e圈时就插端完成。
大致程序如下:
WHILE(Z1
var_t=var_step*T //T是插补周期
var_Z1=var_w*var_t*1000 //var_w是插补速度 var_Z1是凸轮轴
var_Z2=0 //var_Z2是送端轴
var_U=0 //var_U是两PIN轴的虚拟主轴
IF(Z1>a&&Z2
var_t1=var_step1*T
var_Z2=var_w*var_t1*1000
ELSE
var_step1=0
END_IF
IF(Z1>c&&U
var_t2=var_step2*T
var_U=var_w*var_t2*1000
ELSE
var_step2=0
END_IF
END_WHILE
OW8008=4 //运动指令
OW8088=4
OW8808=4
OL801C=var_Z1 //位置指令
OL809C=var_Z2
OL881C=var_U
这个还要结合加减速算法就更好。
大致程序如下:
WHILE(Z1
var_t=var_step*T //T是插补周期
var_Z1=var_w*var_t*1000 //var_w是插补速度 var_Z1是凸轮轴
var_Z2=0 //var_Z2是送端轴
var_U=0 //var_U是两PIN轴的虚拟主轴
IF(Z1>a&&Z2
var_t1=var_step1*T
var_Z2=var_w*var_t1*1000
ELSE
var_step1=0
END_IF
IF(Z1>c&&U
var_t2=var_step2*T
var_U=var_w*var_t2*1000
ELSE
var_step2=0
END_IF
END_WHILE
OW8008=4 //运动指令
OW8088=4
OW8808=4
OL801C=var_Z1 //位置指令
OL809C=var_Z2
OL881C=var_U
这个还要结合加减速算法就更好。
15-03-16 13:26