


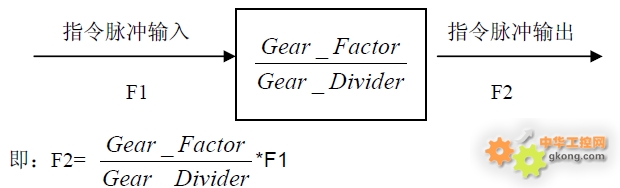
如果电子齿轮比为1:1,外部输入10000个脉冲(编码器分辨率为2500PPR,四倍频),电机转一圈,如果电子齿轮比为2:1,外部输入10000个脉冲,电机将转两圈。![附件 图片1.jpg]()
15-01-22 11:10

角度的度、分、秒;
1圈=360度;
一度=60分;
一分=60秒;
分辩率是4194304的话,相当于1秒还分3.23份;
所以根本不必考虑这个;
上面已经说明,设成1:1的话,一个脉冲就转动1/4194304圈(分辩率是4194304的情况下)
1圈=360度;
一度=60分;
一分=60秒;
分辩率是4194304的话,相当于1秒还分3.23份;
所以根本不必考虑这个;
上面已经说明,设成1:1的话,一个脉冲就转动1/4194304圈(分辩率是4194304的情况下)
15-01-22 14:32