登录
首页
PLC论坛
三菱Mitsubishi
回帖
发帖
正文
主题:三菱伺服疑问??
点击:842 回复:11
楼主
编辑
引用
管理
丶丶小牛
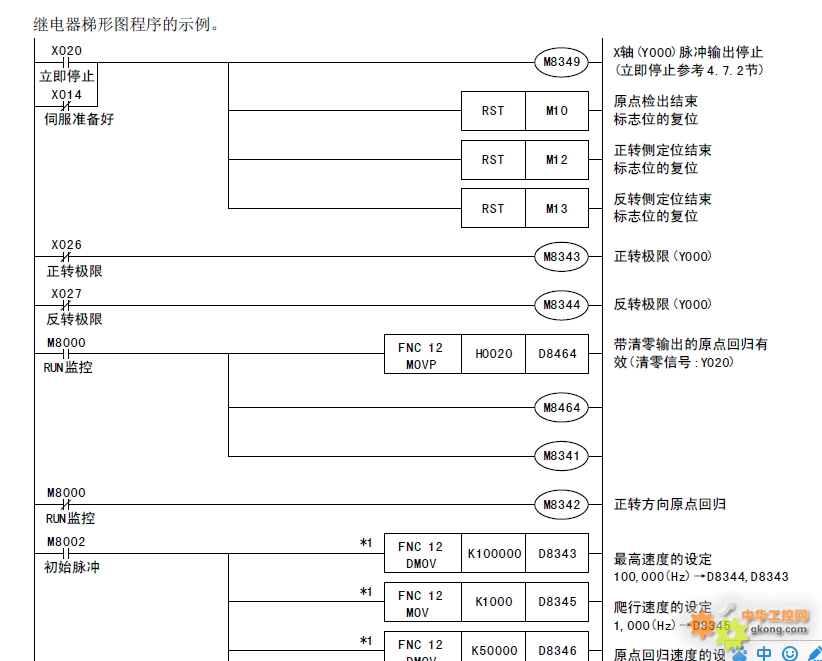
最近在学习三菱FX3U 3G定位程序
在手册中有这样一个示例程序
14-07-07 19:53
1楼
编辑
引用
管理
fumz78
什么情况?
14-07-07 19:54
2楼
编辑
引用
管理
丶丶小牛
1.这程序中的X026和X027正反转极限为什么用常闭点?
2.带清零输出的原点回归有效那段程序怎么理解 也就是什么是带清零输出的原点回归有效 为什么原点回归要清零输出?
14-07-07 19:57
3楼
编辑
引用
管理
丶丶小牛
版主这速度也太快了。。。。
我都还没来得及问问题呢
14-07-07 19:57
4楼
编辑
引用
管理
hwl123
重要的安全信号都是要用常闭电的,就算没有到极限位置,常闭触点及连接电缆有问题也不会造成机械方面的故障,而用敞开触点就完全不同了,当敞开触点及连接电缆有问题,就不能保证在过行程时电机停转而造成机械损坏。
定位控制正在学习,希望高手解答。
14-07-07 20:09
5楼
编辑
引用
管理
fumz78
如楼上所说,行程极限用的是常闭的开关,当碰到极限开关时,极限信号断开,程序中常闭点接到接通,对应的极限的特殊继电器接通。PLC认为碰到极限了,不会再往此方向控制运行了。
14-07-07 20:49
6楼
编辑
引用
管理
wenquan753
学习了!
我开始也不是很清楚
14-07-07 21:46
7楼
编辑
引用
管理
fumz78
plc在原点回归完成后可以在输出点输出一个信号接到伺服的清零端,将伺服内部的滞留脉冲清零。
14-07-07 22:15
8楼
编辑
引用
管理
丶丶小牛
多谢版主
14-07-08 08:13
9楼
编辑
引用
管理
丶丶小牛
这位朋友也正在学习吗 我最初接触到的是QD75MH2的定位 但是看人家编的程序一头雾水啊 所以想从简单一点的学起
以后有不懂得希望指教啊
14-07-08 08:16
上一页
下一页
工控新闻
威灵重载机器人专用伺服电机亮相2025世界机器人大会
当HMI遇见IIoT 台达DOP-300S重新定义智能制造交互体验
普渡机器人闪耀2025世界机器人大会,全形态具身智能产品矩阵震撼首秀
WRC 2025:越疆发布二代人形机器人平台,全场景新质生产力赢得全球客户订单
智能自动化新选择,柯马推出MyCo协作机器人系列
携手苏州大学,共建苏州三菱电机智能制造协同创新中心
苏州松下生产科技有限公司二期工厂盛大竣工 | 共创智能制造新篇章
洞察工业交换机市场风云,捕捉产业新机遇
更多新闻资讯