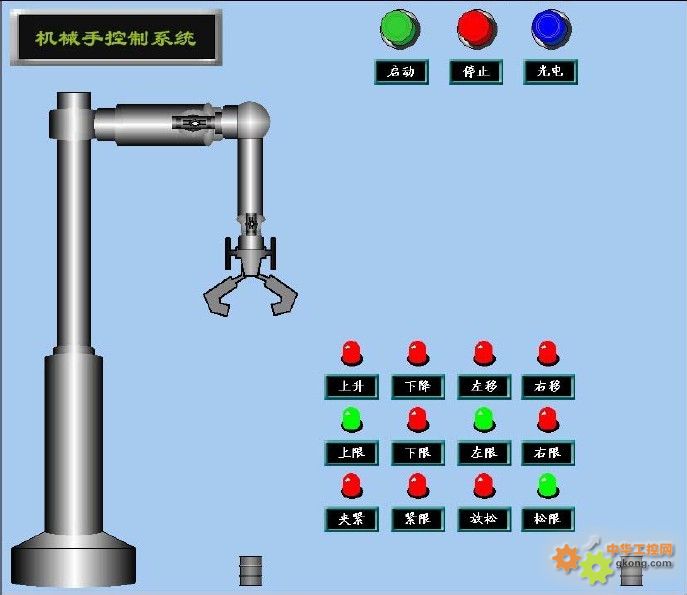
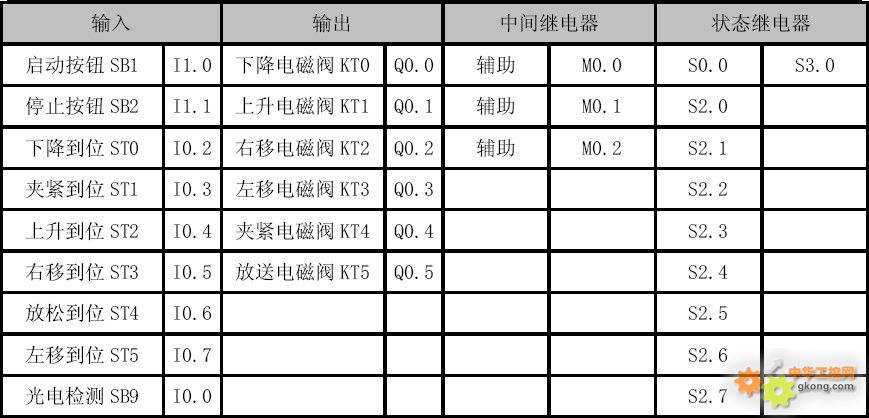
机械手控制系统
一、控制要求:
1、机械手“取与放”搬运系统,定义原点为左上方所达到的极限位置,其左限位开关闭合,上限位开关闭合,机械手处于放松状态。
2、搬运过程是机械手把工件从A处搬到B处。
3、上升和下降,左移和右移均由电磁阀驱动气缸来实现。
4、当工件处于B处上方准备下放时,为确保安全,用光电开关检测B处有无工件。只有在B处无工件时才能放出放下信号。
5、机械手工作过程:启动机械手下降到A处位置——夹紧工件——夹住工件上升到顶端——机械手横向移动到右端,
进行光电检测——下降到B处位置——机械手放松,把工件放到B处——机械手上升到顶端——机械手横向移动返回到左端原点处。
用组态王做的一个模拟画面如下所示:

附件:
[本地下载]附件:
[本地下载]附件:
[本地下载]附件:
[本地下载]三菱PLC以FX1N FX2N FX3G FX3U为主
西门子PLC以S7-200为主
欧姆龙PLC以CP1E CP1L CP1H为主
松下PLC以FPX为主
QQ149034219
欢迎访问我的工控店铺
最后修改:2017/3/11 18:35:11