登录
首页
运动控制
运动控制
回帖
发帖
正文
主题:寻求控制模型及仿真
点击:295 回复:1
楼主
编辑
引用
管理
wfs040
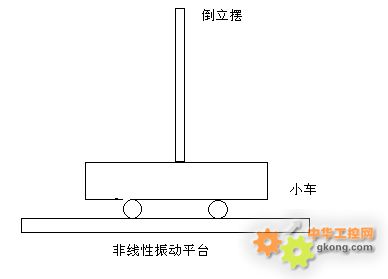
倒立摆的质量为1KG与小车无连接垂直放置,求解:非线性振动平台做无规律振动时摆与小车的位置关系不变的情况下摆的摆动幅度的最大值? 保持垂直的最小值?
唯一可控制的是2维平面上小车的运动。
振动幅度小于1大于0 ,摆的长径比应大于10.
求:控制的数学模型或仿真。
最后修改:
2012/2/26 12:46:02
12-02-26 09:55
1楼
编辑
引用
管理
wfs040
现在降低难度把小车放在复平面上加以控制。思路分析:小车可以看做是二维直线电机平台,摆是立在平台上的。摆与平台为点接触(面接触难度大),可以自己开发设计一个专用二维直线电机和CPU并且固化特定控制算法。(也可以用市场上的产品)注意事项:要考虑扰动,误差,算法的时间效应,初始状态的捕捉和后续运算的精度。可以看做是一个游戏来自由发挥吧。该问题只是控制基础中的基础。属于拟人控制如“杂技中的顶杆”难度在于摆同小车无连接下的倒立控制,有着很大的不可预见性
最后修改:
2012/3/2 21:57:52
12-03-02 11:55
工控新闻
Lantronix 首次推出经济实惠、屡获殊荣的 5G 无线路由器系列,颠覆工业连接方式
霍尼韦尔发布智慧建筑运营管理平台的全新高效运维模块
投资与技术双轮驱动 美团机器人生态版图初显
链博会丨施耐德电气崔志达:技术创新赋能“中国制造”迈向“中国创造”
德昌电机联手上海机电,合资布局人形机器人业务
GTF 聚焦展直击:EVIDENT 工业内窥镜系列为燃气轮机安全护航
2025中国传感器产业:从“感知”到“决策”的跨越式进化
新能源电控业务表现亮眼,变频器厂商上半年净利预增51%-65%
更多新闻资讯