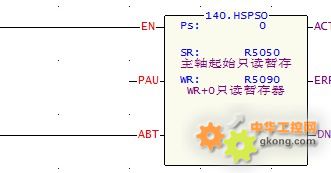
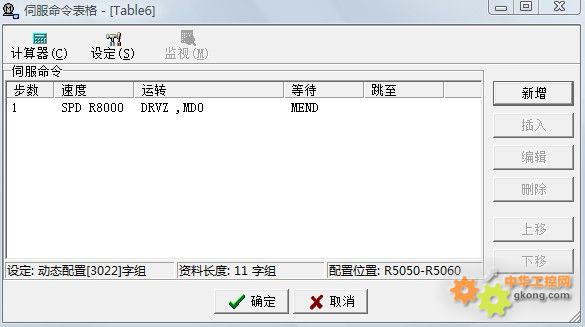
本人接触永宏PLC不就。为什么我用PLC控制伺服作原点复归动作模式,速度受伺服表格参数6,原点复归减速速度---。控制呢?我在伺服命令表格用MD0,D的模式控制伺服原点复归,输入频率是DR8000,DR8000,无论输入多少。。当前速度频率DR4080的数值是参数表格6(原点复归减速速度)的1000的数值,复归速度太慢了。。把参数6(原点复归减速速度)加大,2000或3000等10000都试了。复归速度是快了很多,但是停的位置不是的原点,超出原点位置,参数6的数值越大,跑出原点停止距离就越远,为什么速度频率不是伺服命令表格的速度输入频率控制呢!!很疑惑,要怎么做就不会受参数6(原点复归减速速度)的数值控制。求高手指点,给小弟说说原因,万分感谢。。小弟先谢过!!