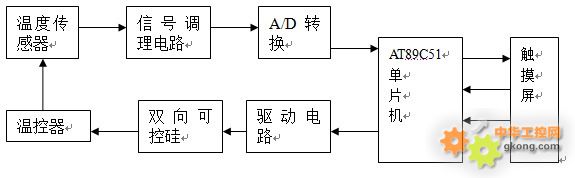
我今年做的毕业设计题目是(基于单片机的触摸屏温度控制系统设计与实现),因为单片机是大四第一学期才学,学得知识有限,现在做这个题目感觉特别吃力,尤其是触摸屏这块不懂,单片机主芯片我选择AT89C51,温度传感器我选的是LM35,A/D转换我用的是ADC0809,大致工作图如下
其中我觉得AT89C51与触摸屏的通信和用PID算法来控制温度设定参数这块比较麻烦具体请看我的任务书,而且我不知道选择哪种触摸屏合适,哪位有爱高手的帮忙解决解决啊,导师说这是她报的题目,但她并不是很懂单片机这块,我现在特别着急,眼看要到4月份了,求求大家指点指点,不胜感激!
(任务书)