登录
首页
PLC论坛
三菱Mitsubishi
回帖
发帖
正文
主题:请问:DRVI和DRVA区别
点击:10770 回复:8
楼主
编辑
引用
管理
zhanghua6070
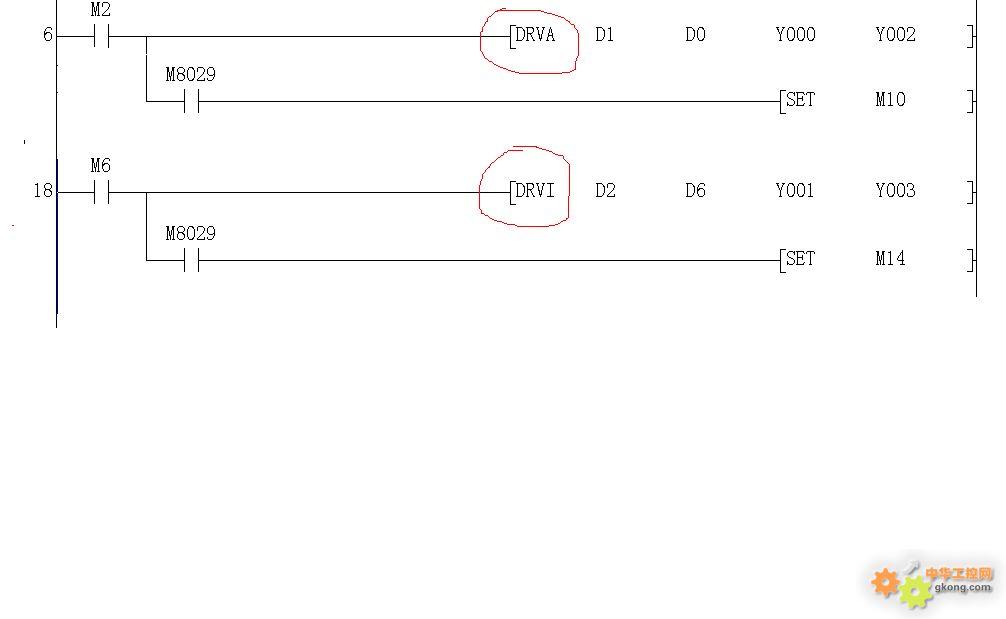
看编程手册没看明白DRVA与DRVI,在实际使用时。
有什么实质上的区别。希望使用过的朋友给解释解释。谢谢!
10-06-07 22:18
1楼
编辑
引用
管理
deletec
哈,我也在研究这个指令。DRVI是相对位置控制指令,以相对驱动方式执行单速位置控制。DRVI则是绝对位置控制指令。
10-06-08 00:23
2楼
编辑
引用
管理
deletec
哈,我也在研究这个指令。DRVI是相对位置控制指令,以相对驱动方式执行单速位置控制。DRVI则是绝对位置控制指令。
10-06-08 00:25
3楼
编辑
引用
管理
deletec
楼主大人,请问你知道怎么使用这两个指令不?请赐教。
10-06-08 00:28
4楼
编辑
引用
管理
sjqing1
一个是绝对坐标,一个是相对坐标。首先要做原点返回(OPR)。
做完OPR后,系统自动生成坐标系。之后,每次定位后,轴都有一个当前位置。如果此时你需要再往正方向移动1mm,那么你用DRVI指令,输入的脉冲数即为目标坐标与当前位置的差值。
定位完成后,当前坐标发生改变,=之前的定位坐标+1mm。
这样的定位,用了N次后,可能轴又需要跑回到原点+1mm的位置,这个时候,虽然我们可以通过数据调用,然后用加减乘除等方式,计算出相对于那个坐标的相对值。但那是很麻烦的一件事了。所以,这个时候,可以用DRVA,指令坐标地址=1mm。定位启动后,轴自动运行到原点+1mm的地方停止。
10-06-08 08:47
5楼
编辑
引用
管理
sjqing1
要用这两个指令,首先要搞清楚OPR功能。
绝对和相对指令,只是参照点不同而已,绝对是以零点为参照,来写入坐标位置。相对定位则是以现在的地址为参照,进行定位。
因为做完OPR后,无论轴运行到那个位置,系统都能确认2个点,一个是原点,另一个是当前坐标,于是也就有了绝对定位和相对定位。
10-06-08 08:54
6楼
编辑
引用
管理
fumz78
定位的参考点不同,楼上解释很清楚
绝对定位就一个参考点,原点,所以要进行原点回归
相对定位,是以当前的位置为参考,这个是每次都变化的,不固定的点
10-06-08 09:34
7楼
编辑
引用
管理
hyxhyx931
学习到了,多谢分享。
10-06-09 18:55
8楼
编辑
引用
管理
zhanghua6070
谢谢各位指点,谢谢!
10-06-09 22:18
工控新闻
推动“5G+工业互联网”规模应用
2024_ITES深圳工业展回顾 CLPA展台
2024_ITES深圳工业展回顾 波菲格
OpenAI真打算造人形机器人? 重组四年前解散团队
IIFES2024 CLPA
叮咚!圣诞好礼已送达,可用于发现“驯鹿”的红外热成像望远镜!
三部门印发《制造业企业数字化转型实施指南》
2024_ITES深圳工业展回顾 3M中国
更多新闻资讯