

楼主聪明绝顶,应该去做教师,假如中国的教师、教授都像你一样这样聪明,那世界霸主早就是中国人而不是什么美国、小日本.......了,希望你能发扬光大,把你的知识用你的智慧传给我们,我在此谢谢了!!
09-11-28 21:47









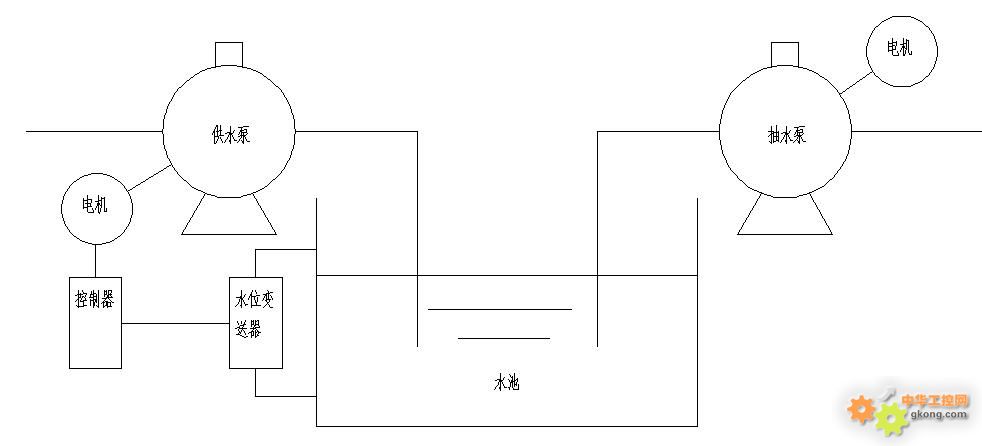
如果只有比例环节,控制器会向供水泵电机发出一个与偏差成正比的电压信号,电机开始旋转,供水泵开始供水,如果电机与泵的响应精度够高的话,水池水位会达到标定值。
此时,假设供水泵刚开始供水,抽水泵电机同时收到与供水泵电机相等的电压信号,则供水泵一边供水,抽水泵一边抽水,偏差不变,控制器发出的电压信号也不会变,水池水位也不会变,永远达不到标定值。这是只有比例环节系统会产生稳态误差的一种情况。
这种情况下,加入积分,积分形式为

实际的自动控制系统多种多样,系统问题的原因也是多种多样的。有的还相当复杂。这只是一个简单的例子。
振荡的产生是由于系统中的储能元件或者控制精度不高有滞后等原因造成的,最简单的例子就是无阻尼的弹簧系统(力为输入,位移为输出)。适当修改PID参数一般都可以消除。
微分可预测偏差的趋势,从而实现对系统的超前调节,达到缩小超调量的目的。比如如果偏差减小,微分就是负数,偏差增大,微分就是正数。偏差变化越快,微分绝对值越大。注意:微分应慎重使用。
最后修改:2009-12-11 20:38:14
09-12-11 20:26