Micro/WIN 提供了PID Wizard(PID 指令向导),可以帮助用户方便地生成一个闭环控制过程的PID 算法。此向导可以完成绝大多数PID 运算的自动编程,用户只需在主程序中调用PID 向导生成的子程序,就可以完成PID 控制任务。PID 向导既可以生成模拟量输出PID 控制算法,也支持开关量输出;既支持连续自动调节,也支持手动参与控制。建议用户使用此向导对PID 编程,以避免不必要的错误。如果用户不能确定中文编程界面的语义,我们建议用户使用英文版本的Micro/WIN,以免对向导中相关概念发生误解。建议用户使用较新的编程软件版本。在新版本中的PID 向导获得了改善。
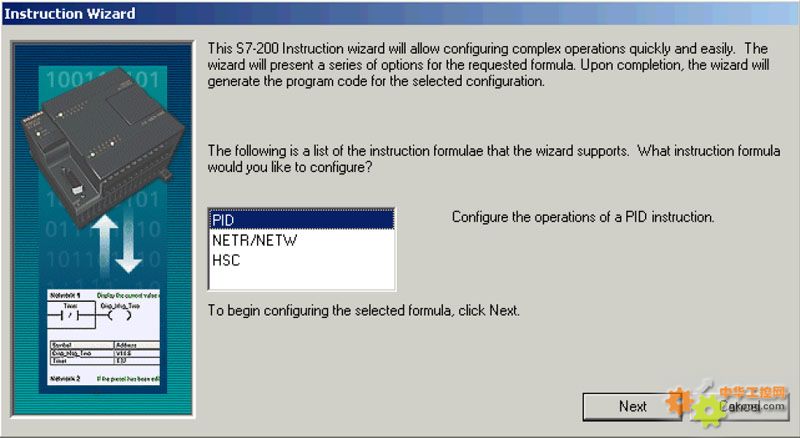
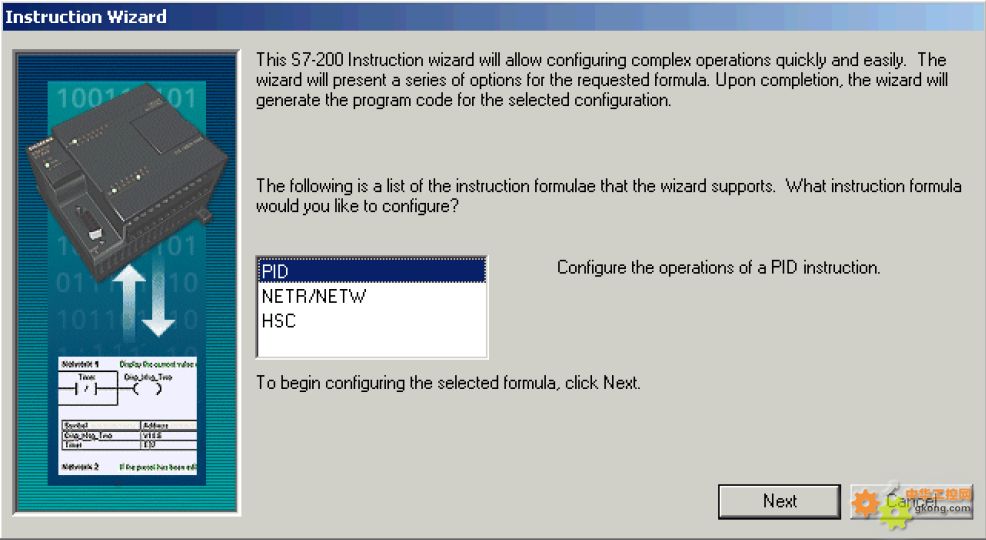
PID 向导编程步骤:在Micro/WIN 中的命令菜单中选择Tools > Instruction Wizard,然后在指令向导窗口中选择PID 指令:图1. 选择PID 向导
最后修改:2009-8-23 8:05:12