登录
首页
PLC论坛
西门子SIEMENS
回帖
发帖
正文
主题:【话题】西门子1200步进电机运动控制如何实现暂停功能?(20241010)
点击:326 回复:17
楼主
编辑
引用
管理
接地保护
如题如何实现暂停功能呢?是暂停不是急停或停止。用的步进电机做定位控制,比如从A点到B点,在电机正在运行时此时按下暂停键就立马停止,松开就继续接着走到目的地。 俺试了好多种方法都不行,网上也没找到相应办法。在1200中步进定位控制中途是可以停止,比如绝对定位控制运行中如果按下停止是停止了,但不能继续接着走到目的地,必须要重新回原点再次触发绝对定位才能走到设定点位,感觉这不科学啊。
俺想既然运动控制PLC驱动步进或伺服运行是通过发脉冲,难道中途就不暂停么?比如从A点到B点需要10000个脉冲,当发了5000个脉冲走到中途一半时可以暂停,然后也能恢复继续发剩下的5000个脉冲使其走到目的点位。
最后修改:
2024/10/11 9:47:25
24-10-10 13:35
1楼
编辑
引用
管理
2969985636
你确定不是你程序写的有问题呢
24-10-10 14:30
2楼
编辑
引用
管理
YS-W
好像有专用的指令吧?
24-10-10 15:33
3楼
编辑
引用
管理
bnnyygy
应该是你的程序有问题把。
绝对定位过程中,启动MC_STOP,然后轴停止,再次启动绝对定位,我感觉应该是没问题的。
例如你所说的,按下暂停键,启动MC_STOP,轴有个停止减速时间,你要等轴完全停止以后,才可以启动绝对定位,不然就不会动,而且功能块有对应的报错代码,你可以把程序加上看看。
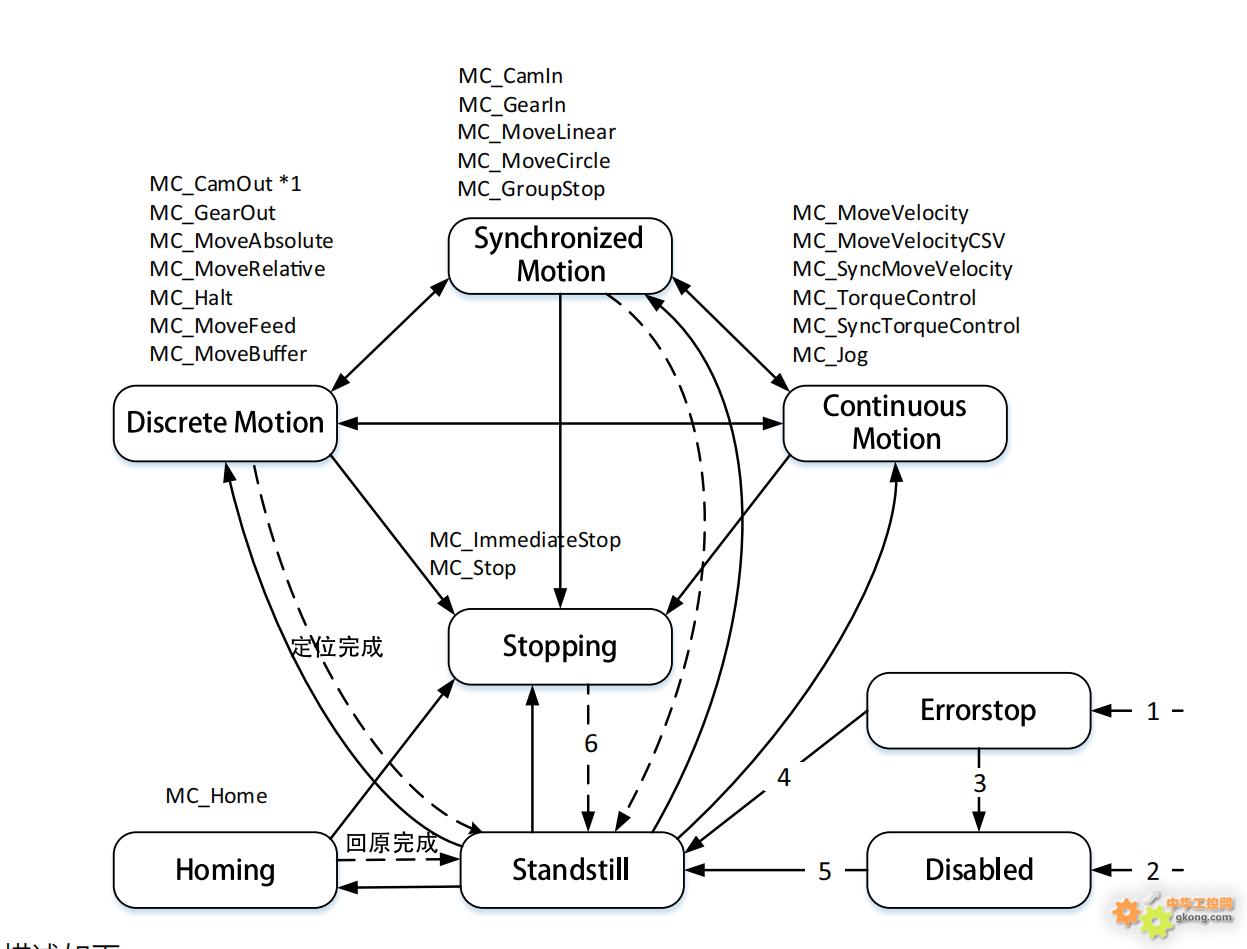
ETERCAT轴控有个状态机,理论上,西门子的轴也有状态机,你要加上启动绝对定位条件,也就是说,要满足条件才可以启动定位,
自己封装轴控功能块条件多加一些,这样外面做逻辑BUG少一些。
附:PLCOpen状态机<不是西门子>
最后修改:
2024/10/10 19:26:07
24-10-10 19:22
4楼
编辑
引用
管理
981183833
这个应该很容易做到啊,搞不懂为啥你用了很多种方法都不行
24-10-11 15:14
5楼
编辑
引用
管理
接地保护
这个怎么可能是程序问题呢?1200PLC运动控制都是用里面成品的封装程序,比如启动轴 手动轴 复位轴 绝对定位轴,相当于只是调用这些轴而已,实际上都不算自己编写程序。
24-10-11 19:52
6楼
编辑
引用
管理
接地保护
是有个专门的暂停轴,可是这个程序名字叫暂停轴实际就是停止轴,停止后并不能接着继续走了
24-10-11 19:53
7楼
编辑
引用
管理
接地保护
求大佬指点方法,1200运动控制只要组态好后都是直接调用成品的封装程序来控制定位的,在里面虽然有个暂停轴程序,但这个实际就是停止并不是暂停,触发这个指令后只是停止了,如果是绝对定位的话还是要重新回下原点才能走。
24-10-11 19:56
8楼
编辑
引用
管理
接地保护
1200的运动控制程序都是调用里面现成封装好的程序而已,只是把对应管脚赋值而已,都算不上自己编程。俺组态好后就是按照常规的调用了MC_Power_启动轴、 MC_Reset_错误确认轴、 MC_Home_归位轴、 MC_MoveAbsolute_绝对定位轴、 MC_MoveJog_点动轴、 MC_Halt_暂停轴。这几个轴程序。其它几个用不着的程序也没看到有相应可以实现暂停的管脚。 而且要实现急停的话也是用MC_Halt_暂停轴实现的,问题是触发这个轴以后就是停止而不是暂停,一旦触发了暂停轴,那么绝对定位就必须重新回下原点(触发下MC_Home_归位轴)才能运行。也就是比如从A点走到B点,如果中途任意位置触发了暂停轴停止后,那么剩下没有走完的就不能接着继续了,必须要回下原点。
不知道是哪里没搞对,求大佬指点迷津啊,谢谢!
24-10-11 20:19
9楼
编辑
引用
管理
bnnyygy
引用
接地保护
在 2024/10/11 20:19:12 发言
【内容省略】
让你发个程序这么难吗,如果不是工程所需,没必要折腾。
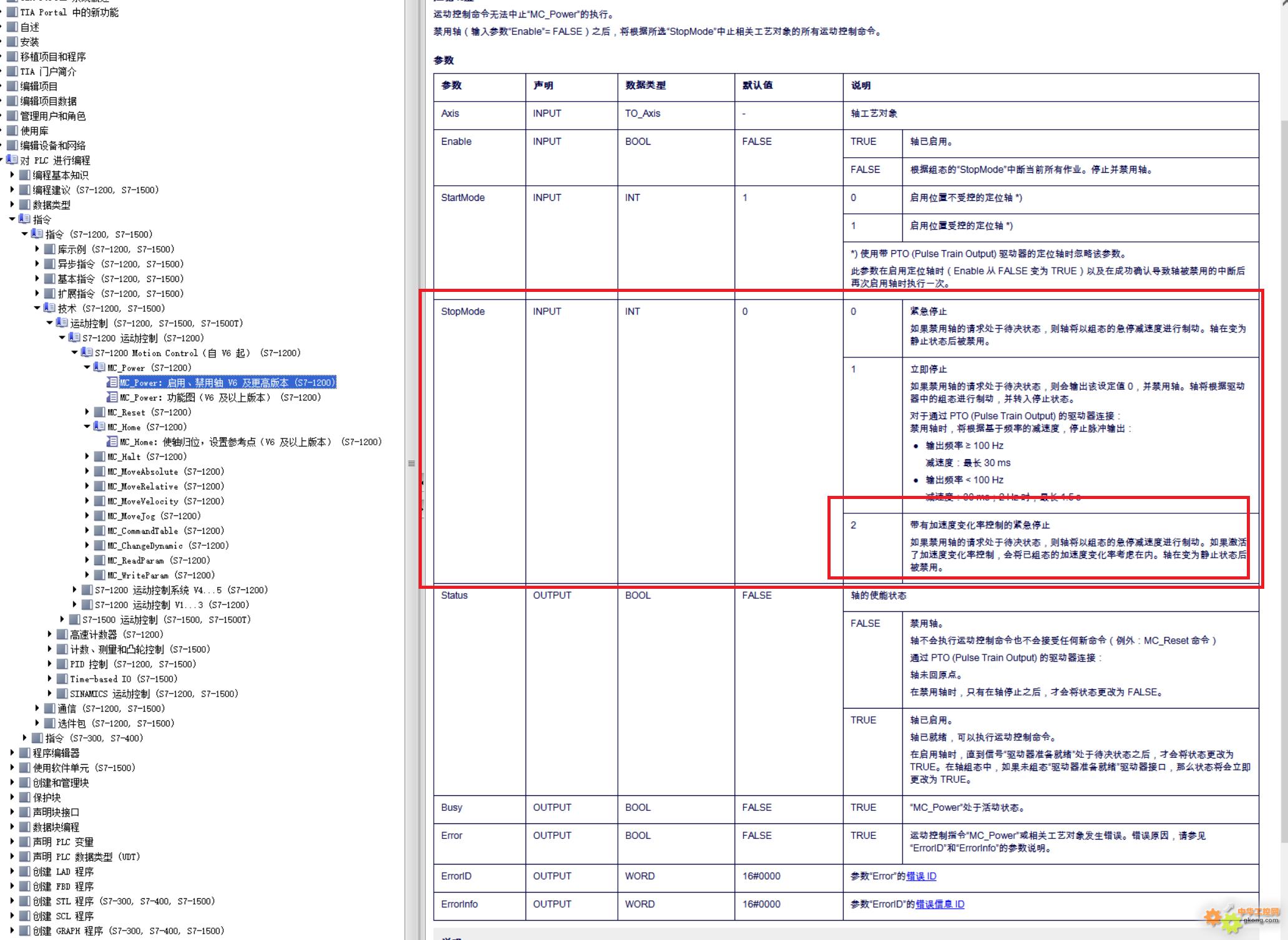
MC_功能块就这么几个,多看下手册估计就搞定了
24-10-11 21:14
上一页
下一页
工控新闻
皮尔磁:小巧灵活高性价比的工业PC问世
后摩尔时代的创新:在米尔FPGA上实现Tiny YOLO V4,助力AIoT应用
加入SICK视觉系统集成商团队,共创智能未来
BIS-6388B:搭载英伟达JETSON系列处理器,助力夯实算力底座
施耐德电气:技术引领,场景驱动,让AI“触手可及”
逐梦新程,茵梦达传动技术沈阳分公司盛大开业!
国内首台电力场景人形机器人“揭开面纱”
罗克韦尔自动化发布年度《智能制造现状报告:生命科学版》
更多新闻资讯