各位,实际测试了一下,
我写的逻辑有问题。
计算误差那个,每次计算是不科学的。
逻辑应该这样:
例:
停机位是50,实际停在了180,机械惯性130度,这个值如果没有调速的情况是不变的,<我的程序是每次计算>
程序应该逻辑判断偏差值师傅大于多少然后再计算实际停机角度值。
我在改改。
我用脉冲轴替代编码器轴测试,调整编码器轴速度,减速时间。
测试如下:
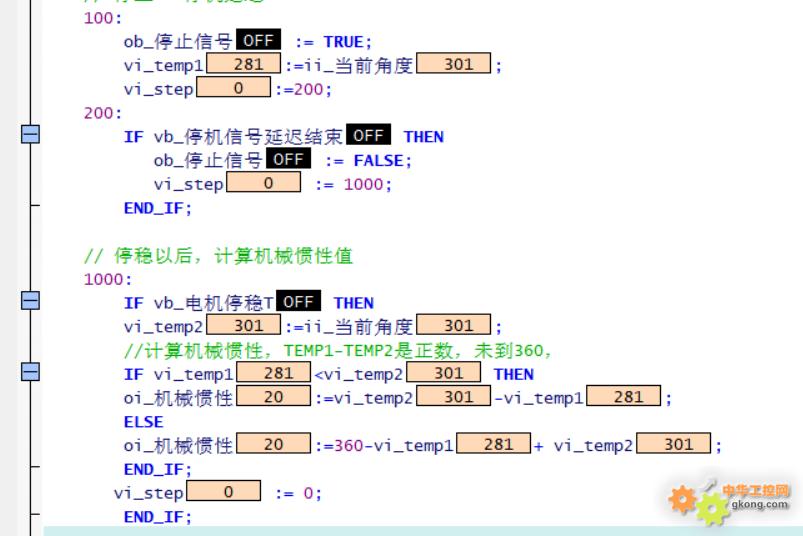
![附件 afac483d-3d20-426b-9597-4f5305b5703a.jpg]() 1,计算出机械惯性,<每次计算>
1,计算出机械惯性,<每次计算>
2,计算出给定值,<+2是为了避免判断成翻一圈了>。
下午继续。
测试如下:

2,计算出给定值,<+2是为了避免判断成翻一圈了>。
下午继续。
25-03-05 12:23