

第五篇:双闭环调速系统的工作原理
我记录这些力求浅显易懂,不照本宣科。对双闭环调速系统,很多朋友可能在学习这里时搞不懂内外环是怎么个工作的。如上篇的图片所示,内环是电流环,外环是速度环。驱动器正常工作时,内环跟随外环,一旦外环即速度环饱和,内环开始主控。
那么怎么理解速度环饱和呢?
为了消除速度环与电流环的静差,设计了两个PID调节器,如速度环PID调节器,当用户给定速度,那么速度环运行时与反馈速度进行比较,通过PID调节器输出来加速或者减速从而达到用户的设定值。
假如用户给定了500转,调速器实际反馈速度只有0转,速度环PID调节器开始输出一个增益值,并且此值将不断的累积,使电机不断加速,假定此时PID调节器积分输出达到最大值,调速器实际反馈速度只有350转,一直达不到用户给定值,此时就是饱和状态,由于速度环饱和,电流环开始主控调节。
由于积分的累积,速度一直在没达到500转时,整个调节器处于饱和状态,即速度环输出一直很大,退不下来,那么什么时候退饱和呢,当速度超过500转比如501转时,由于反向的信号让速度环退出饱和状态,此时速度环开始起作用。
或者可以分析电机的启动过程,当电机刚开始启动时,电机由于克服静转矩和启动转矩,此时达不到用户的设定值,速度环的输出饱和,电流环起作用,开始控制电机启动,由于电机加速,电流从启动电流降至正常的工作电流,速度继续上升,速度环开始退饱和,速度调节器开始调节速度。
双闭环调速系统的原理,总结一句话就是,速度环和电流环两个PID同时调节电机的速度和电流,当外环(速度环)起作用时,内环(电流环)跟随。当外环饱和时,内环主控。
这里最难理解的是“饱和”两个字。
打个不恰当的比喻,外环是小明,内环是张三,他们两个一起组队跑步比赛,小时负责速度跑至目标,张三负责跟随,补充两个人的体能,结果小明发现不管怎么使劲,发出全身的爆发力,也跑不上目标,这个时候他就达到了饱和状态,张三此时就全盘负责控制体能,不能过度消耗,维持一定的力量。后面小明追上了目标,不需要使上全部的力气了,这个时候他就不是饱和状态了,张三就不用操心那么多了,只是跟随小明继续就行了。
外环负责调速的精度,消除偏差;而内环负责限制电流,当电机过载或者堵转时,起快速的保护作用,一旦故障消失,系统立即恢复正常。
可以说双闭环调速系统是当今自动控制系统的不可缺少的驱动控制基础,即使是伺服驱动器也是在双闭环调速系统的基础上再建立一个位置环,理论仍然一脉相承。
我记录这些力求浅显易懂,不照本宣科。对双闭环调速系统,很多朋友可能在学习这里时搞不懂内外环是怎么个工作的。如上篇的图片所示,内环是电流环,外环是速度环。驱动器正常工作时,内环跟随外环,一旦外环即速度环饱和,内环开始主控。
那么怎么理解速度环饱和呢?
为了消除速度环与电流环的静差,设计了两个PID调节器,如速度环PID调节器,当用户给定速度,那么速度环运行时与反馈速度进行比较,通过PID调节器输出来加速或者减速从而达到用户的设定值。
假如用户给定了500转,调速器实际反馈速度只有0转,速度环PID调节器开始输出一个增益值,并且此值将不断的累积,使电机不断加速,假定此时PID调节器积分输出达到最大值,调速器实际反馈速度只有350转,一直达不到用户给定值,此时就是饱和状态,由于速度环饱和,电流环开始主控调节。
由于积分的累积,速度一直在没达到500转时,整个调节器处于饱和状态,即速度环输出一直很大,退不下来,那么什么时候退饱和呢,当速度超过500转比如501转时,由于反向的信号让速度环退出饱和状态,此时速度环开始起作用。
或者可以分析电机的启动过程,当电机刚开始启动时,电机由于克服静转矩和启动转矩,此时达不到用户的设定值,速度环的输出饱和,电流环起作用,开始控制电机启动,由于电机加速,电流从启动电流降至正常的工作电流,速度继续上升,速度环开始退饱和,速度调节器开始调节速度。
双闭环调速系统的原理,总结一句话就是,速度环和电流环两个PID同时调节电机的速度和电流,当外环(速度环)起作用时,内环(电流环)跟随。当外环饱和时,内环主控。
这里最难理解的是“饱和”两个字。
打个不恰当的比喻,外环是小明,内环是张三,他们两个一起组队跑步比赛,小时负责速度跑至目标,张三负责跟随,补充两个人的体能,结果小明发现不管怎么使劲,发出全身的爆发力,也跑不上目标,这个时候他就达到了饱和状态,张三此时就全盘负责控制体能,不能过度消耗,维持一定的力量。后面小明追上了目标,不需要使上全部的力气了,这个时候他就不是饱和状态了,张三就不用操心那么多了,只是跟随小明继续就行了。
外环负责调速的精度,消除偏差;而内环负责限制电流,当电机过载或者堵转时,起快速的保护作用,一旦故障消失,系统立即恢复正常。
可以说双闭环调速系统是当今自动控制系统的不可缺少的驱动控制基础,即使是伺服驱动器也是在双闭环调速系统的基础上再建立一个位置环,理论仍然一脉相承。
21-11-16 20:44
第六篇:速度控制和转矩控制
前面讲了驱动器是一个双闭环调速系统,那么我们就可以利用驱动器来实现速度控制和转矩控制。
如果想入门双闭环调速系统控制,最佳的首选是调试欧陆590直流调速器。相信很多搞传动的朋友都对它早有耳闻甚至打了无数交道。调试完590直流调速驱动器,可以熟悉什么是弱磁,什么是速度环,什么是电流环,速度控制怎么做,转矩控制怎么做,在传动控制这块也就得心应手。
下面我们看看它的说明书中的一个框图:
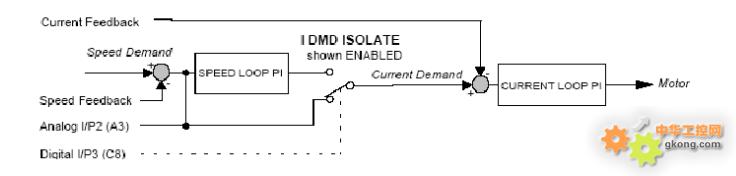
![附件 3719.jpg]() 它清楚的简单表明了双闭环调速系统的框图,速度给定与速度反馈的识差,进入速度环调节,同时速度环输出后换算成电流给定值,与电流反馈值的误差进入电流环调节输出给马达。
它清楚的简单表明了双闭环调速系统的框图,速度给定与速度反馈的识差,进入速度环调节,同时速度环输出后换算成电流给定值,与电流反馈值的误差进入电流环调节输出给马达。
图中在速度环输出与电流环输入之间有一个切换开关,它表明了当用户如果开关打到上面(默认),那么它就是速度控制,电流跟随,外环起作用;而如果它打开下面,那么电流环的给定切换到A3模拟量输入,此时它工作在转矩控制模式下,而C8端子就是这个切换开关的信号来源。
通过这种切换,就可以实现了速度控制与转矩控制的切换。实现不同场合的要求。
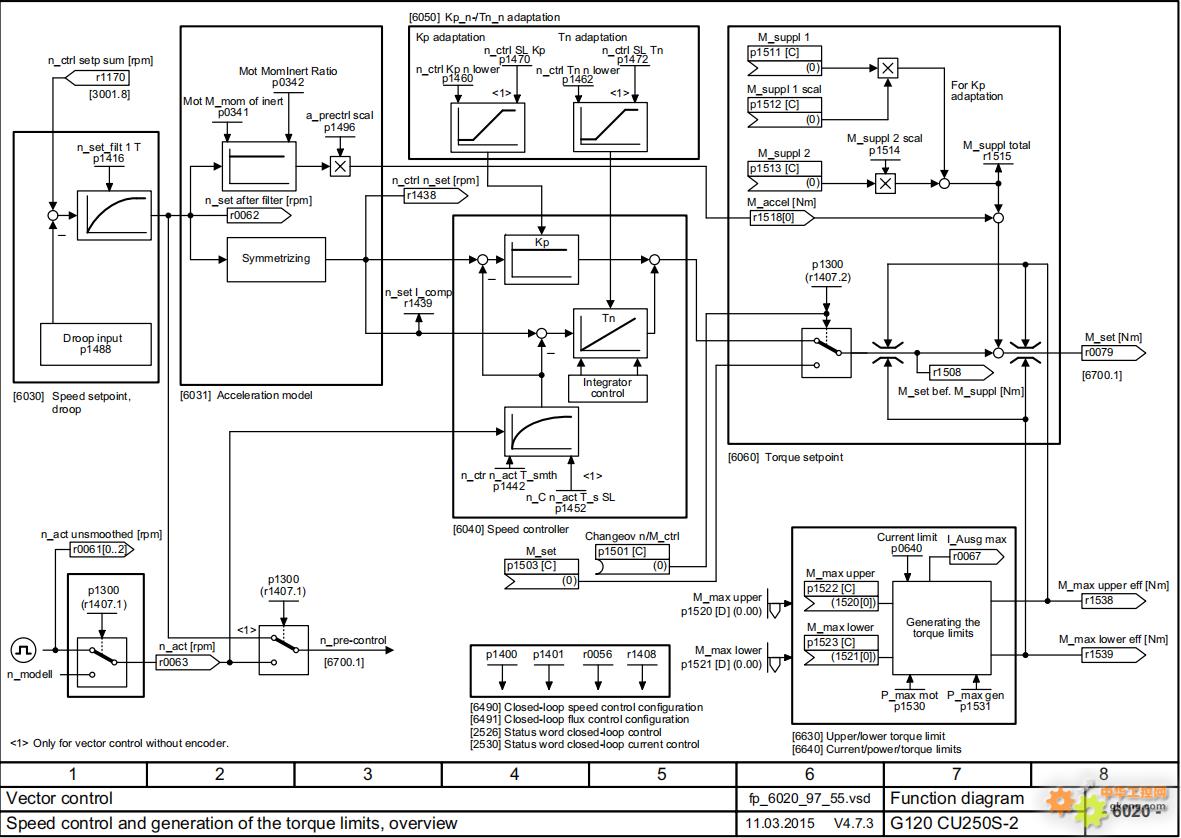
下面我们再来看看西门子G120变频器CU250控制单元的框图,看看它是告诉我们如何实现速度控制和转矩控制的:
![附件 2501.jpg]() 这个图可能很多朋友陡然一看会有点懵,那么我在图上作些标记,方便大家快速理解:
这个图可能很多朋友陡然一看会有点懵,那么我在图上作些标记,方便大家快速理解:
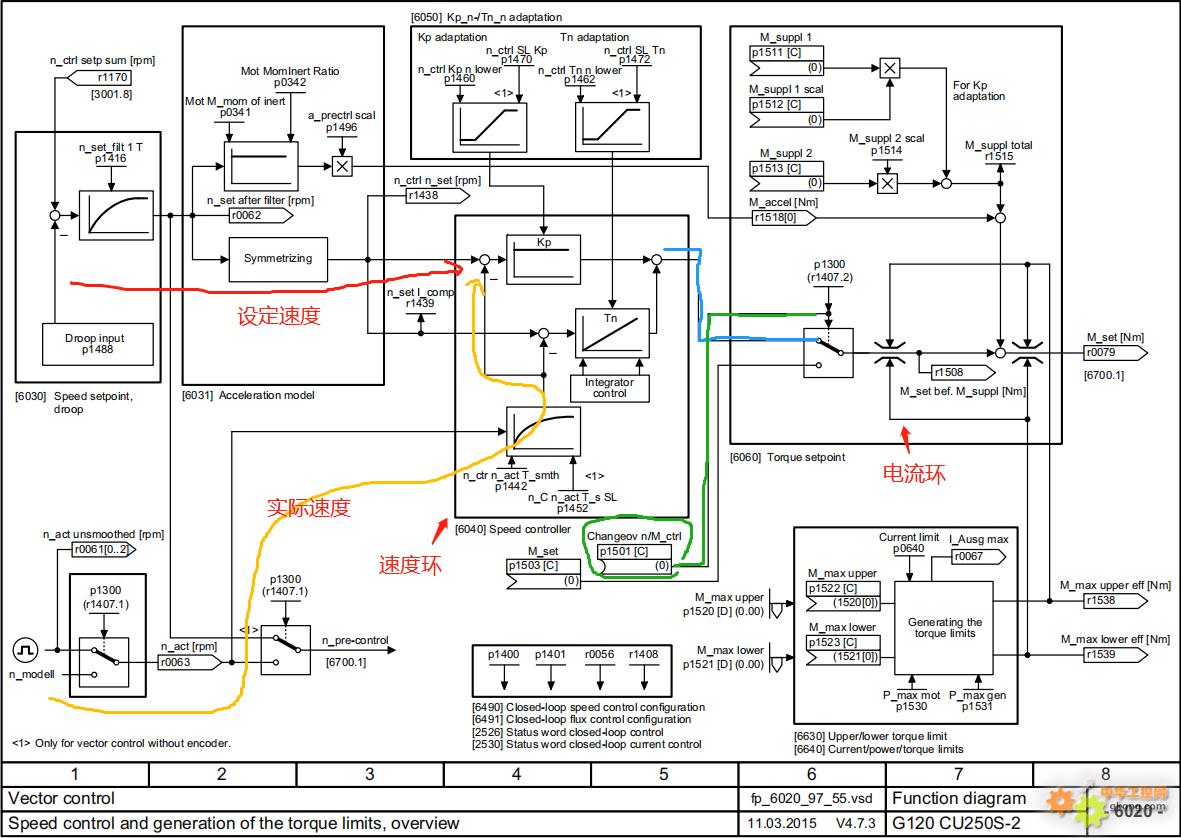
![附件 2502.jpg]() 这个图同样也表明了它是基于双闭环调速系统的控制框架,速度设定值和速度反馈值的误差经速度环调节后输出到电流环,在速度环与电流环之间也有一个和上面590一样的开关,它给用户提供了速度控制和转矩控制的选择,如我所标示,只要我们设置参数P1501 为1就可实现转矩控制,为0则速度控制,同时也可能通过组态将外部输入信号关联这个参数就实现了速度控制和转矩控制的切换。
这个图同样也表明了它是基于双闭环调速系统的控制框架,速度设定值和速度反馈值的误差经速度环调节后输出到电流环,在速度环与电流环之间也有一个和上面590一样的开关,它给用户提供了速度控制和转矩控制的选择,如我所标示,只要我们设置参数P1501 为1就可实现转矩控制,为0则速度控制,同时也可能通过组态将外部输入信号关联这个参数就实现了速度控制和转矩控制的切换。
这两个例子让我们可以理解到,原来学习理解并且能够运用双闭环调速系统知识,对传动控制是有着非常大的帮助。甚至也可以说,如果不懂双闭环调速系统,是无法精通传动控制,无法解决各类传动设备的控制问题的。
前面讲了驱动器是一个双闭环调速系统,那么我们就可以利用驱动器来实现速度控制和转矩控制。
如果想入门双闭环调速系统控制,最佳的首选是调试欧陆590直流调速器。相信很多搞传动的朋友都对它早有耳闻甚至打了无数交道。调试完590直流调速驱动器,可以熟悉什么是弱磁,什么是速度环,什么是电流环,速度控制怎么做,转矩控制怎么做,在传动控制这块也就得心应手。
下面我们看看它的说明书中的一个框图:
图中在速度环输出与电流环输入之间有一个切换开关,它表明了当用户如果开关打到上面(默认),那么它就是速度控制,电流跟随,外环起作用;而如果它打开下面,那么电流环的给定切换到A3模拟量输入,此时它工作在转矩控制模式下,而C8端子就是这个切换开关的信号来源。
通过这种切换,就可以实现了速度控制与转矩控制的切换。实现不同场合的要求。
下面我们再来看看西门子G120变频器CU250控制单元的框图,看看它是告诉我们如何实现速度控制和转矩控制的:
这两个例子让我们可以理解到,原来学习理解并且能够运用双闭环调速系统知识,对传动控制是有着非常大的帮助。甚至也可以说,如果不懂双闭环调速系统,是无法精通传动控制,无法解决各类传动设备的控制问题的。
21-11-17 19:59
第七篇:速度环饱和转矩限幅
前面一篇讲了速度控制与转矩控制,对转矩控制的实现方式是通过设置参数,将速度环抛开直接控制转矩。
但在很多场合一旦直接转矩控制负载发生负载突然消失的话,就会导致飞车,因为速度环被抛开。所以在很多场合是不采用直接转矩控制的,特别是如印刷,纸张,钢卷等收放卷设备。那么如何避免这种情况发生呢?这就需要采用速度环饱和转矩限幅的控制方式。
所谓速度环饱和,就是人为刻意的让速度环一直处于饱和状态,从而通过转矩的限幅值精准控制电机的转矩;一旦发生断卷,速度环马上退饱和,从而开始调节速度避免飞车。这就非常适合各类收放卷控制了。
那么如何让速度环饱和呢,简单说就是给一个让电机跑不上去的速度设定值,这样它的速度环PID输出即使达到最大也达不到设定值,累死它,它就饱和了。怎么做呢?
以收卷电机为例,假如收卷直径和前面的牵引电机的辊直径相同,那么空卷的时候,按照线速度相等的原则给定牵引电机500转的时候,收线给定也是500转,这样他们的速度相等,从而线速度相等。
但是我们人为的在给定牵引电机500转的时候,再叠加了5%的速度给到收卷电机,同时对收卷电机的驱动器电流环进行转矩限幅,限幅值等于卷材的张力。
此时,收卷电机本来要跑到500+5%转的,但是由于卷材的张力让它被拉住,它只能跑到与牵引电机相等的线速度即500转就上不去了(因为线速度相等原则),它一直跑不到你给定的500+5%转,速度环饱和,而转矩限幅控制保持卷材合适的张力,这样就确保了生产线速度快,收卷电机也同步快,线速度慢,收卷电机就同步慢,同时保证卷材张力,能够合适的进行卷曲。
那假定某个时刻卷材突然断了,这个时候收卷电机由于没有被负载拉住,它开始撒欢,速度开始上升,一旦超过500+5%转的时候,速度环开始退饱和,速度环起作用,控制速度在500+5%转,而不会允许电机继续上升,确保了安全。
速度环饱和转矩限幅的控制方式在各类张力卷曲控制方面广泛应用,只要涉及到收放卷类控制,基本脱离不开这套理论。
前面一篇讲了速度控制与转矩控制,对转矩控制的实现方式是通过设置参数,将速度环抛开直接控制转矩。
但在很多场合一旦直接转矩控制负载发生负载突然消失的话,就会导致飞车,因为速度环被抛开。所以在很多场合是不采用直接转矩控制的,特别是如印刷,纸张,钢卷等收放卷设备。那么如何避免这种情况发生呢?这就需要采用速度环饱和转矩限幅的控制方式。
所谓速度环饱和,就是人为刻意的让速度环一直处于饱和状态,从而通过转矩的限幅值精准控制电机的转矩;一旦发生断卷,速度环马上退饱和,从而开始调节速度避免飞车。这就非常适合各类收放卷控制了。
那么如何让速度环饱和呢,简单说就是给一个让电机跑不上去的速度设定值,这样它的速度环PID输出即使达到最大也达不到设定值,累死它,它就饱和了。怎么做呢?
以收卷电机为例,假如收卷直径和前面的牵引电机的辊直径相同,那么空卷的时候,按照线速度相等的原则给定牵引电机500转的时候,收线给定也是500转,这样他们的速度相等,从而线速度相等。
但是我们人为的在给定牵引电机500转的时候,再叠加了5%的速度给到收卷电机,同时对收卷电机的驱动器电流环进行转矩限幅,限幅值等于卷材的张力。
此时,收卷电机本来要跑到500+5%转的,但是由于卷材的张力让它被拉住,它只能跑到与牵引电机相等的线速度即500转就上不去了(因为线速度相等原则),它一直跑不到你给定的500+5%转,速度环饱和,而转矩限幅控制保持卷材合适的张力,这样就确保了生产线速度快,收卷电机也同步快,线速度慢,收卷电机就同步慢,同时保证卷材张力,能够合适的进行卷曲。
那假定某个时刻卷材突然断了,这个时候收卷电机由于没有被负载拉住,它开始撒欢,速度开始上升,一旦超过500+5%转的时候,速度环开始退饱和,速度环起作用,控制速度在500+5%转,而不会允许电机继续上升,确保了安全。
速度环饱和转矩限幅的控制方式在各类张力卷曲控制方面广泛应用,只要涉及到收放卷类控制,基本脱离不开这套理论。
21-11-18 17:18
第八篇:速度环饱和转矩限幅实际案例
案例A:某机械设备两个电机是同一个皮带连接,要求两电机速度相等,输出转矩相等
方案:如果直接给定两个电机的速度,很难保证速度完全同步,同时也不一定能使出相同的转矩,那么如何控制呢?假定电机A为主电机,电机B为从电机,电机A作为主速度给定,电机B的驱动器则让其速度环饱和,同时电机B的转矩限幅值给定为电机A的实际转矩值。
让电机B的速度环饱和方法前面已说过,就是在电机A速度给定的基础上再附加一个值,由于皮带连接A和B,导致B的速度跑不上这个给定值,速度环饱和,实际速度就是A电机的速度。
案例B:某生产线有两个牵引电机,要求生产线速度同步稳定
方案:由于两个电机都是牵引电机,那么即使给定一样的线速度给定值,也不能保证它们的实际线速度相等,就会导致生产线要么松要么蹦紧。此时需要选择一个牵引电机作为整条生产线的线速度给定,而另外一个电机采用速度环饱和,转矩限幅。这样才能确保两个电机的线速度相等,生产线不会或松或紧的现象,这样才能同步。
案例A:某机械设备两个电机是同一个皮带连接,要求两电机速度相等,输出转矩相等
方案:如果直接给定两个电机的速度,很难保证速度完全同步,同时也不一定能使出相同的转矩,那么如何控制呢?假定电机A为主电机,电机B为从电机,电机A作为主速度给定,电机B的驱动器则让其速度环饱和,同时电机B的转矩限幅值给定为电机A的实际转矩值。
让电机B的速度环饱和方法前面已说过,就是在电机A速度给定的基础上再附加一个值,由于皮带连接A和B,导致B的速度跑不上这个给定值,速度环饱和,实际速度就是A电机的速度。
案例B:某生产线有两个牵引电机,要求生产线速度同步稳定
方案:由于两个电机都是牵引电机,那么即使给定一样的线速度给定值,也不能保证它们的实际线速度相等,就会导致生产线要么松要么蹦紧。此时需要选择一个牵引电机作为整条生产线的线速度给定,而另外一个电机采用速度环饱和,转矩限幅。这样才能确保两个电机的线速度相等,生产线不会或松或紧的现象,这样才能同步。
21-11-18 17:31

 感谢分享
感谢分享