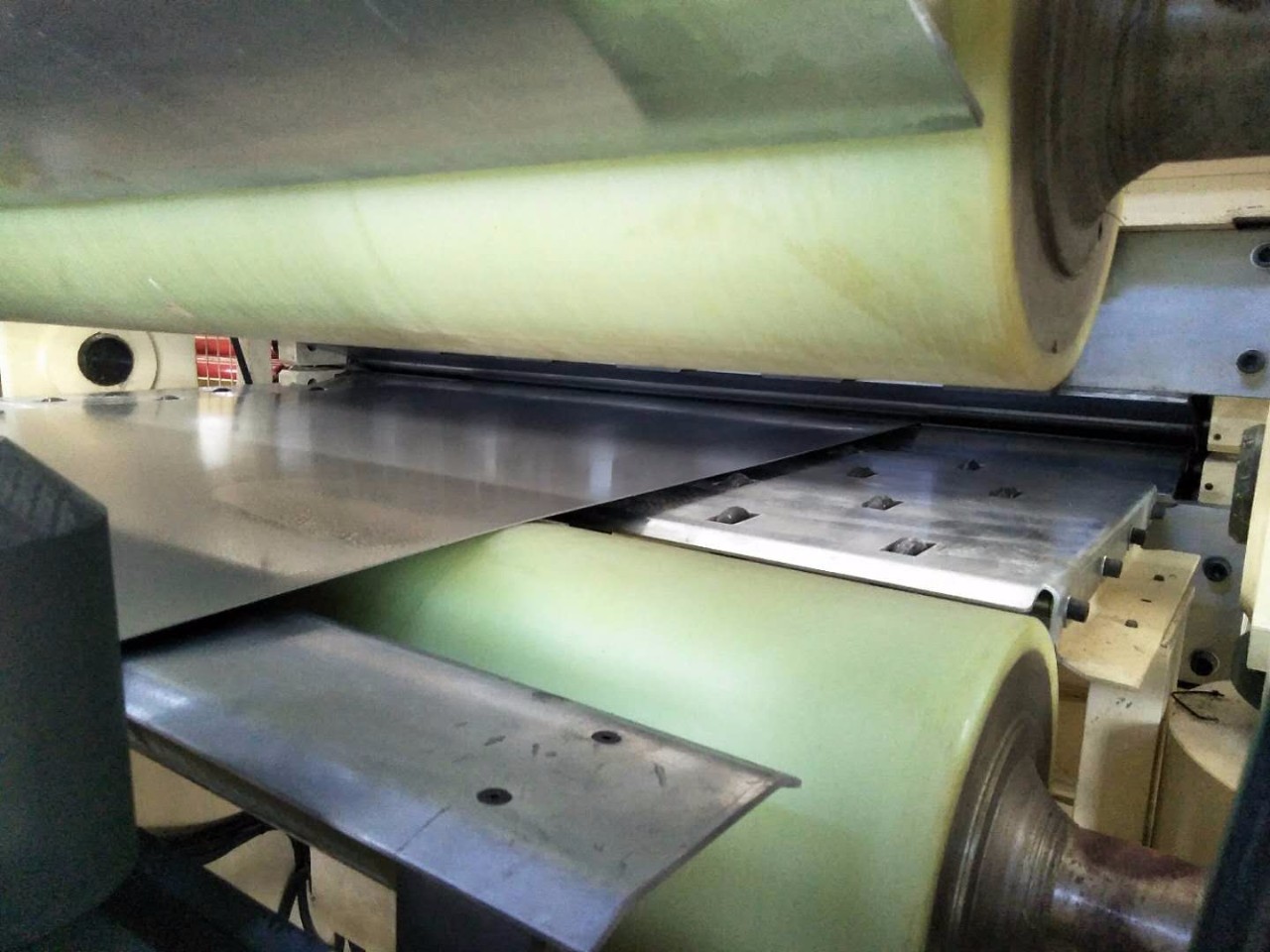
设备为滚轮送料机,当材料较薄、有油污、线速度较快时会导致滚轮打滑从而出现送料误差,之前我们采用的方法是伺服自带全闭环单元做全闭环控制,即外部测长装置编码器直接接进伺服放大器,通过伺服内部运算实时修正补偿,精度确实提高了很多!随之而来的问题也有,那就是定位速度上不去。现在有个设想,想通过QD75定位模块脉冲量的补偿方式来修正误差值,即当前位置和外部测长装置编码器位置作比较,由定位模块决定发脉冲量的多少,这样伺服只作为执行者,响应应该会快很多吧。不知在定位运行中改变当前位置这个方法可行否?在三菱FX里面肯定是不行的,这我知道![附件 送料.jpg]()
18-07-17 19:12

看图片,楼主的机器应该是镀锌板定长切割,图片中是一对夹紧轮,应该还有一对啊,也是一起动作的,主要是防止出现楼主提到的打滑的问题,另外开料卷后面也是有一对的,工艺上调节好线速就可以解决问题,希望对你有帮助
18-07-17 22:07