其实我有很多年不用单片机了,最近还是05年的时候还用过一段儿。现在拿起来,就当重温旧梦。
做这个小车的经验教训:
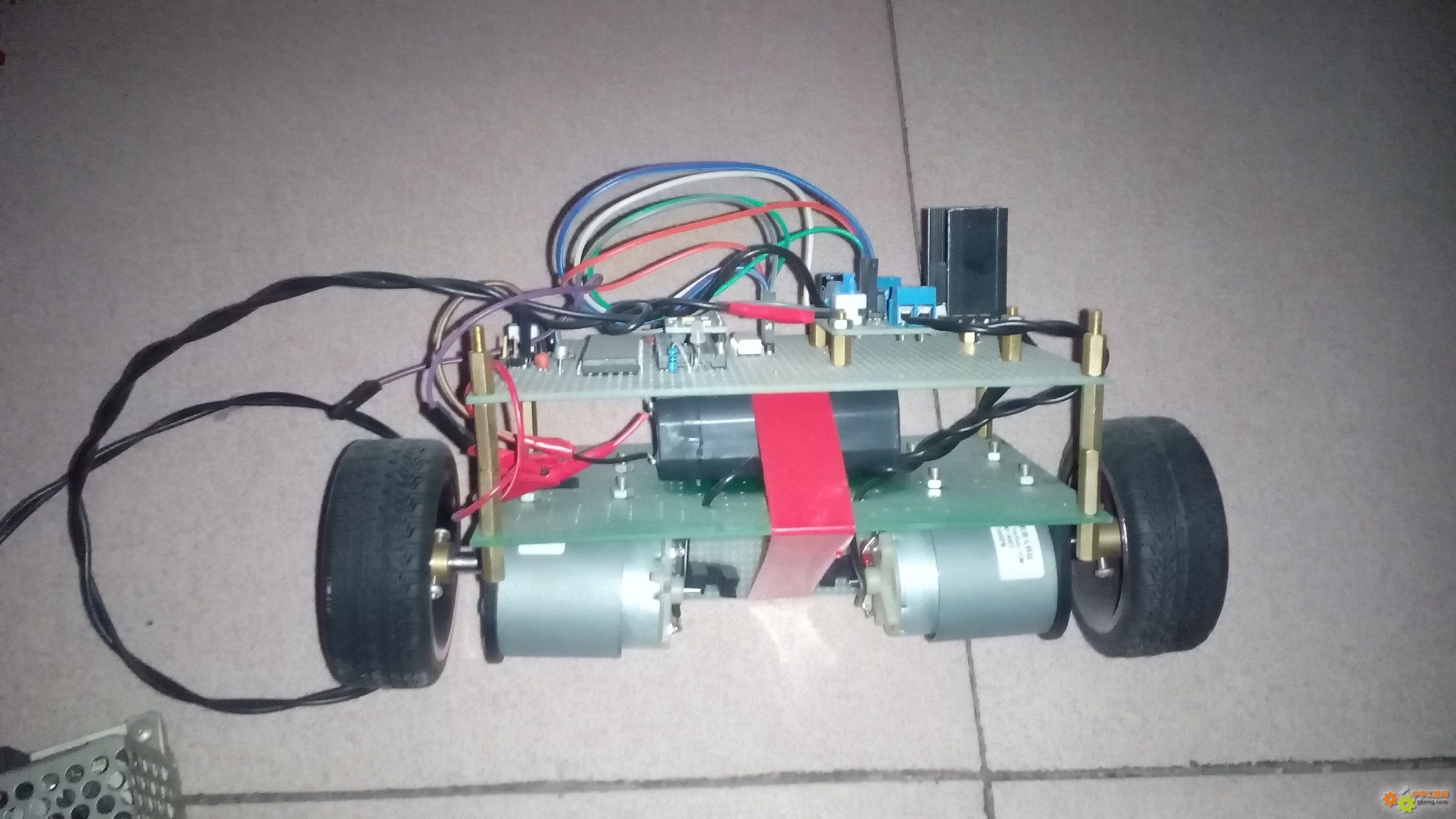
第一是要选好电机,我的电机反向间隙很大,这是导致小车振荡的最严重根源;因为有反向间隙,小车倾斜后,算法控制电机进行调整,电机先要把反向间隙转过之后,才能够真正使角度得到调整,但这个空转过程的出现,已经是给定、反馈偏差增大不少,这时车必然会振荡。
第二是“节约”的导致俺没有再用心调整下去,尤其是电源,从网上买电池,要100来块,俺没有买,花得钱少,所以稍微调出个模样,就扔那儿不玩儿了——当然也是因为俺那时恰好要出差;等回来之后工作任务大增,也没心情了。
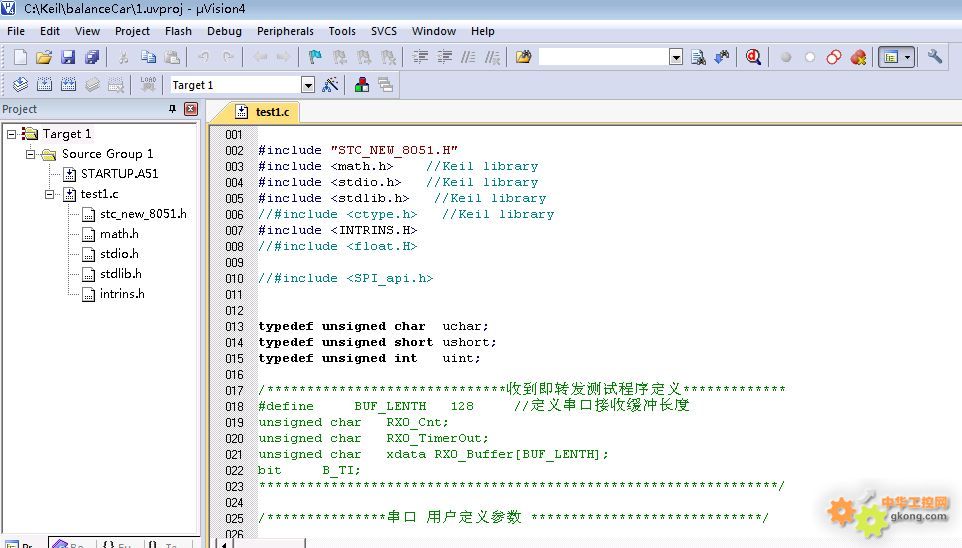
第三是了解了一点卡尔曼滤波的理念;俺并没有依照别人给的程序去实现平衡,PWM、PID都是自己重新写了一遍,卡尔曼我也是深读其义后进行了精简和调整;因为放下单片机10来年,软件都忘了,我索性从最基础的程序一步步测起,前后编译了400来次,才调成了这么个傻模样。
第四可怜买的那2块2.4G,本来俺是想做个几十米内能遥控的小车,因为出差,还没焊完,都放下不调了。
第五我虽然买了槽形光耦,但因为嫌麻烦,其实并没有安装好它。也就就是说,没有速度检测的情况下,小车平衡是没问题的。当然,如果想做成较完满的小车,还须要把小车的前进、后退、左右转都用遥控做出来才成——但是,俺现在已经没有那心情了。
转让小车、附件及所有资料,200元不包邮,哈哈
最后修改:2014/5/28 20:36:41