
工程说明:
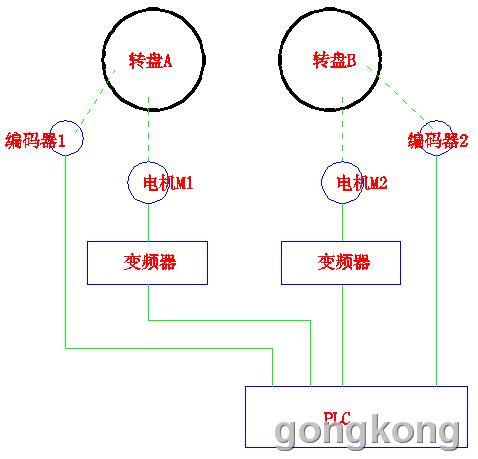
两异步电机分别驱动转盘A、转盘B连续旋转。转盘A转一圈编码器1也转一圈发1000个脉冲,转盘B转一圈编码器2也转一圈发出1000个脉冲
要求1、 在联动状态下,转盘A跟随转盘B达到角度同步效果(比如转盘B转到300°转盘A也转到300°,当然是有允许偏差范围的)
2、在联动刚启动时,两转盘都要先找到原点位,才可以联动;停止时,两转盘也要停到原点位。
3、编码器都有接A、B、Z相,以便于对原点位及消除累积偏差。
我的思路是,通过比较编码器1跟编码器2的偏差值经过PID运算输出控制转盘A达到随动跟踪目的。但是做程序的时候要消除累积误差就要在Z相到来时对计数值进行清零,这样就会出现PID的输入偏差值会发生突变,出现系统不稳点。
希望大虾,给小弟指点一下。有样例的最好发个样例。谢谢大虾们帮我指点。.邮箱:49427670@QQ.com
补充说明:其实我这个工程对角度同步的要求不是很高的,只要求大致跟上就可以了,但是不能有累积偏差。
http://fs.gongkong.com/uploadpic/forum/201301/2013011416594900001_w.bmp
最后修改:2013/1/14 17:05:16




{kind=link}