
刘志斌
2、我先讨论,后总结成文;
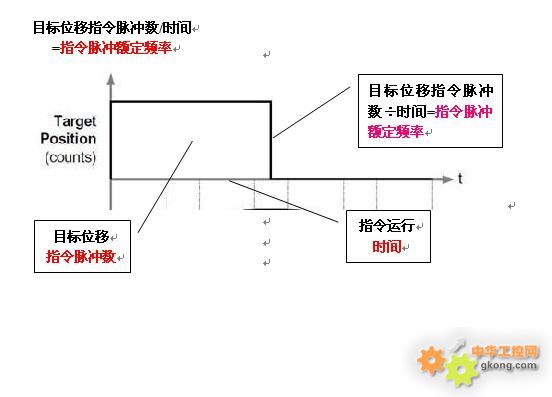
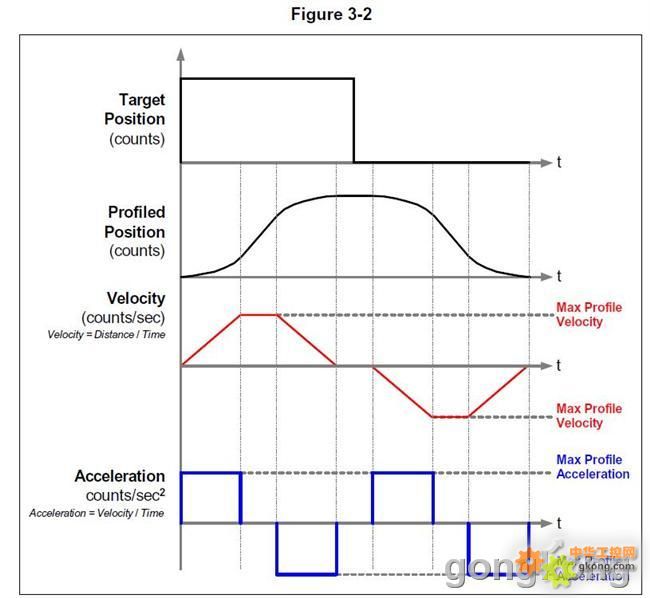
运动工件目标位移÷脉冲当量=目标位移指令脉冲数
2、伺服周指令脉冲数=螺距/减速比÷脉冲当量
3、指令脉冲额定频率为位置环计数上限频率,指令脉冲额定频率=伺服周指令脉冲数×电机最大速度,当电机速度超过电机最大速度,位置环脉冲会丢失而位置失控;
4、伺服周指令脉冲数=编码器周反馈脉冲数/电子齿轮比
5、这条指令脉冲频率曲线图是个设定曲线图,实际运行中没有指令脉冲以及它的发送问题;
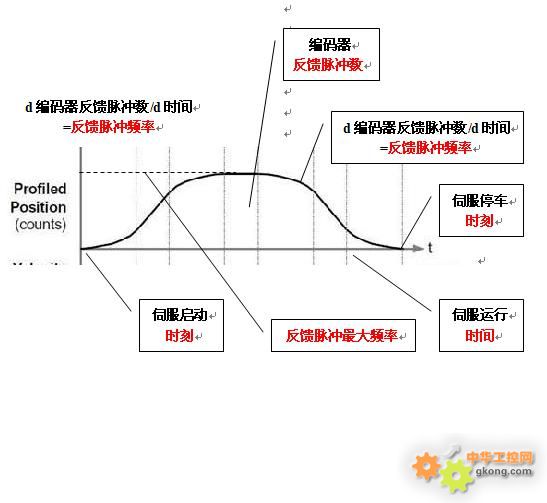
2、你完全可以看成伺服实际运行过程的速度曲线图,因为
编码器反馈脉冲频率=编码器周反馈脉冲数×伺服电机速度(r/s)
3、编码器反馈脉冲数/电子齿轮比=目标位移指令脉冲数,是位置闭环实现位移精确控制的核心原理,如果
编码器反馈脉冲数/电子齿轮比≠目标位移指令脉冲数
就说明控制有误差,控制绝对误差
控制绝对误差=(编码器反馈脉冲数/电子齿轮比 - 目标位移指令脉冲数)×脉冲当量;
4、编码器反馈脉冲最大频率,对应伺服运行最大速度,伺服最大运行速度要小于1图伺服最大速度,或者说 编码器反馈脉冲最大频率/电子齿轮比≤指令脉冲额定频率,否则会出现丢失脉冲控制失败的问题;
5、从曲线可以看出,伺服控制运行的要点,还有起步后有加速、停车前要减速,即编码器反馈脉冲曲线是一个梯形波,特别是停车前减速很重要,只有速度减下来了,才能实现准停;
6、伺服实际运行速度要小于1图的最大速度,伺服的运行速度可以在速度环通过给定编码器反馈脉冲频率(或者指令脉冲频率=反馈脉冲频率/电子齿轮比)给定;
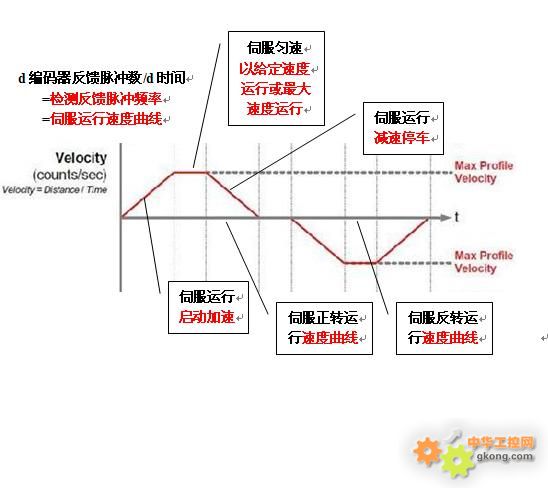
2、速度环给定编码器反馈脉冲频率(或给定指令脉冲频率=编码器反馈脉冲频率/电子齿轮比)就是给定伺服速度
编码器反馈脉冲频率=编码器周反馈脉冲数×电机速度(r/s)
3、速度环靠编码器检测反馈脉冲频率,即认为是速度的反馈;
4、速度环控制的是交流电机的频率、电压,就控制量交流电机的速度;
5、速度环的工作原理就是变频器工作原理,加、减速设置在速度环上,既可以是频率电压的加、减,也可以是反馈脉冲频率的加、减;

2、也就是伺服运行加速加速度和减速加速度曲线;
3、其值为加、减速曲线的斜率,也是编码器反馈脉冲频率曲线梯形波腰的斜率;
4、此图也可以看做电流环的电流波形图,加、减速伺服电流环电流给定,恒电流恒转矩调速过程;
5、电流环可给定电流或给定编码器反馈脉冲频率的变化率,检测反馈运行电流或检测反馈编码器反馈脉冲频率变化率!


