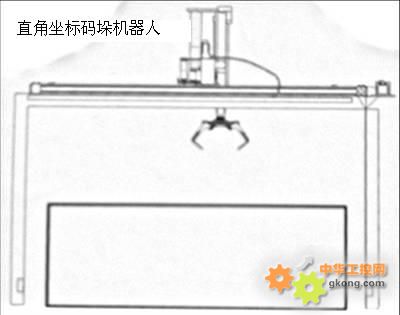
直角坐标码垛机器人
搭配灵活,负载、行程调整方便,无需复杂算法控制,在活动范围极大或极小、负载范围极大或极小时非常适合,但存在占地大、运行速度慢、安装周期长,维修保养缺点。
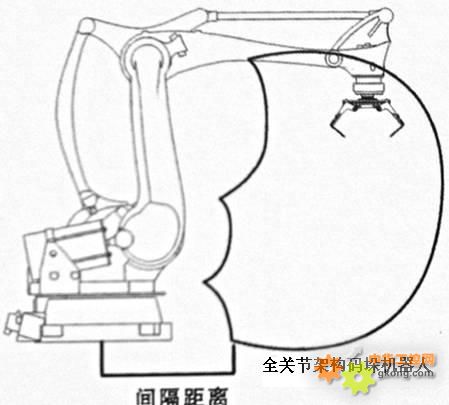
运行稳定、速度快,但受关节架构的球型坐标系统影响,活动范围有较大的损失,并且价格昂贵
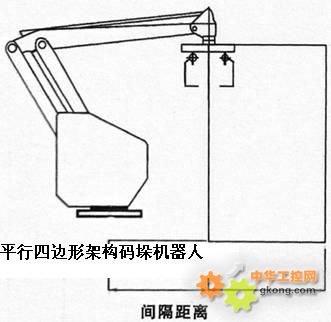
圆柱形坐标系,两条直线轴通过复杂的铰链结构放大,不但零件点数多并且安装复杂,因为无需算法支持,故低端码垛机大多以此架构为原型机。但因为加工及装配水平不够,国产码垛机的效率稳定性均达不到原厂的70%。
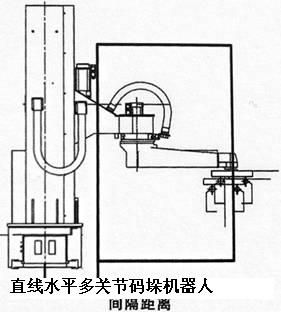
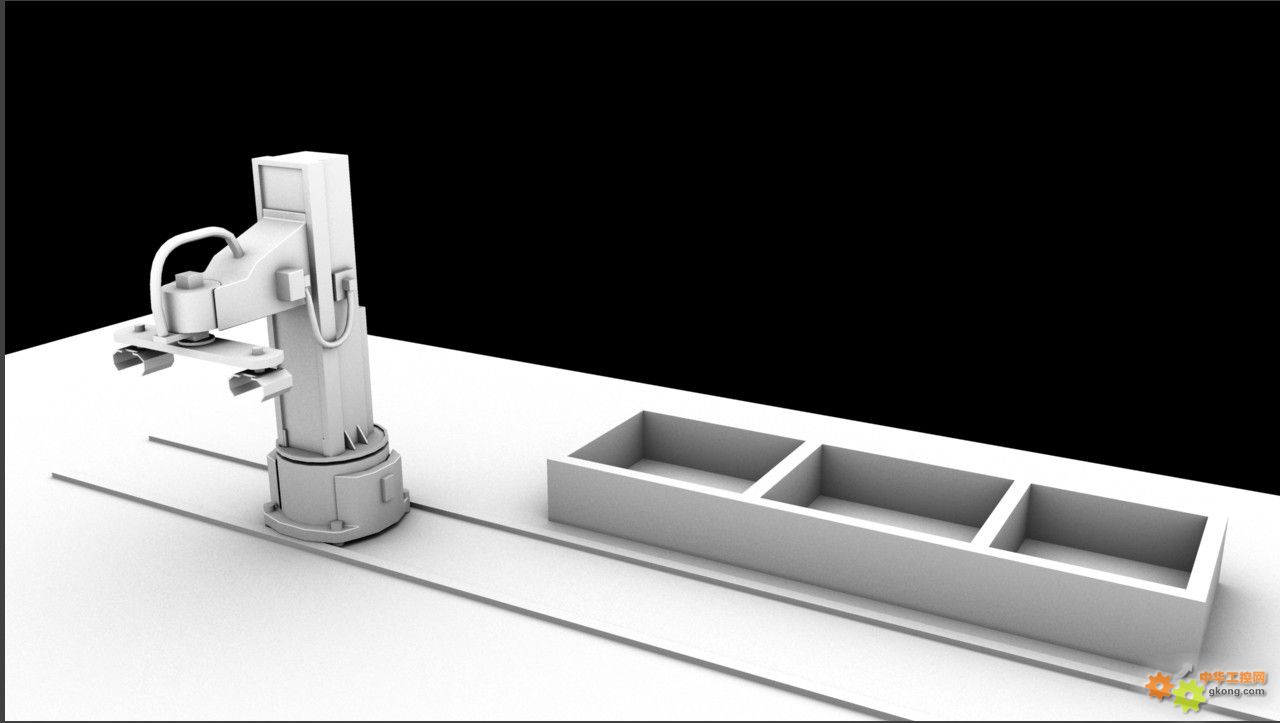
拥有与全关节机器人同样的稳定性与高效率;又有FUJI-ACE同样的圆柱坐标系;更有直角架构一样的低成本;有着比全关节及四边形架构更小的间隔距离,在负载与活动范围不超标下此机型最为合适。
广州展亮
http://www.gzaobbs.com
最后修改:2012/5/27 10:41:37