登录
首页
运动控制
运动控制
回帖
发帖
正文
主题:伺服回原点精度保证
点击:1212 回复:7
楼主
编辑
引用
管理
zhou-jinzhang
在伺服回原点过程中,以前一般采取如下办法:
首先给一个速度指令,碰到原点传感器后以一更低的速度来找第一个Z相脉冲信号,这样在实际应用过程中没什么问题。
但有点不明白。
例:伺服驱动丝杆,丝杆导程10MM
从碰到原点传感器到第一个Z相脉冲信号之间理论上来说最大会有一个导程(10mm)的误差,但在实际应用过程中没有如此大的误差,
其中的原因有哪位大侠可以指点一下
最后修改:
2011/9/7 16:42:58
11-09-07 16:16
1楼
编辑
引用
管理
lj19820422
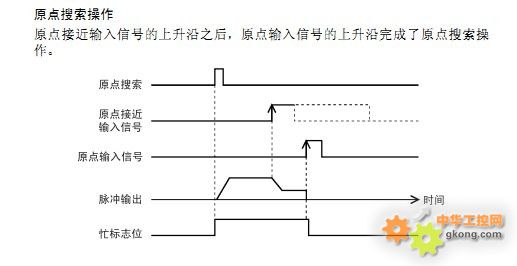
如时序图所示,当给一个回原点信号后,发出脉冲电机像原点方向移动,当碰到原点接近传感器后,速度降低继续回原点运动。当碰到原点信号后。停止脉冲~!
11-09-07 16:55
2楼
编辑
引用
管理
zhou-jinzhang
最后修改:
2011/9/8 9:43:01
11-09-07 21:29
3楼
编辑
引用
管理
匿名用户
该用户被锁定!
11-09-08 12:02
4楼
编辑
引用
管理
wanwan8778
楼主说的导程(10mm)是不是伺服电机连接后的丝杠吧,原则上来说是没有这个10mm的
11-10-22 22:45
5楼
编辑
引用
管理
wanwan8778
引用
lj19820422
在 2011/9/7 16:55:19 发言
【内容省略】
补充一下,2楼正解,呵呵
11-10-22 22:48
6楼
编辑
引用
管理
fuyongcheng
是伺服电机旋转一圈发出的一个Z相脉冲跟导程没关系
11-10-29 19:57
7楼
编辑
引用
管理
gangshiyuan
不错,我也正想知道数控机床回零原理。
11-10-29 19:57
工控新闻
物料搬运自动化起重机劳易测传感器解决方案
技术报告 | 劳易测安全激光扫描仪RSL 200
零碳园区成为新风口,创维光伏引领从0到1创新实践
我国提出的全球首个电力储能用超级电容器国际标准成功立项
海外收入跨越式增长 中国工程机械从“走出去”到“走进去”
皮尔磁:氢能安全——未来能源的关键命题
和利时助力上海电气洮南市风电耦合生物质绿色甲醇一体化示范项目顺利投产
ABB集团发布2025年第二季度业绩
更多新闻资讯