——晶闸管直流调速装置的电路原理分析与调试
(电子管)二极管的出现,使人们找到了控制电流方向的“钥匙”,(电子管)三极管的出现,使人们掌握了控制电流大小的奥妙,人类文明由此进入了电子时代的新纪元。做为“弱电”的电子元件,从来都希望并且也有能力在“强电领域”占有一席之地,晶闸管在工业控制领域得以广泛的应用,即是一个有力的证明。
电子器件的发展,经历了电子管、晶体管、(小、中、大规模)集成电路的三个阶段。其中电子管除在高频高压电路,得到极少数应用外,常规电路中已难见到它们的踪影。但晶体管电路的“阵地”随集成电路的“强势出击”虽有所缩小,但并示全盘“退却”,像上文所述的滑差电机调速盒,仍以由晶体管分立元件构成的电路为主流。
正在应用中的直流电机调速器,仍有部分由晶体管分立元件构成的整机电路,分析其原理和给出检修指导,仍具有实际意义,并且为进一步掌握由集成电路(或单片机)构成的直流调速电路,也相当于一个基础和原理性的铺垫。
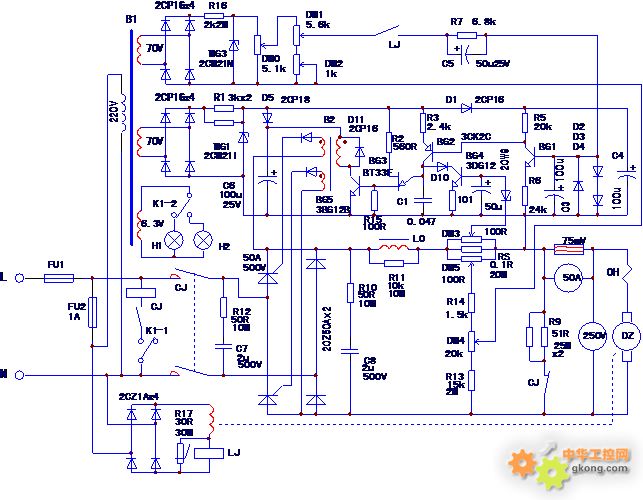
该电路用于小功率他励直流电机的调速与起停控制。
〔主电路〕由单相半控整流桥、滤波电抗器L0构成,桥式整流电路的左侧由两只晶闸管串联而成,右则的两只串联二极管(2CZ50A)与两只晶闸管呈并联关系,两只二极管身兼双职,即可作为整流元件,又并接于电枢绕组两端,提供电枢绕组的反电势通路,起到为电枢绕组的“续流作用”,因而该电路省去了并接于电枢电源两端的续流二极管。电抗器L0可抑制整流后脉动成分,改善电机的换向并降低电机损耗和温升,同时起到提高电网侧功率因数的作用,减弱晶闸管与二极管非线性整流造成的谐波影响。
〔励磁电路〕由桥式整流器组成,电机励磁线圈并串有电流继电器LJ,当励磁电流消失时,主电路晶闸管的触发信号同时消失,电枢绕组同时断电,避免了电机超速(或飞车)运行。他励和和复励直流电机的调速控制电路,都设有励磁电流检测回路,以实现“失磁”时的停机保护。
〔移相触发电路〕由DW0、DW1、DW2、晶体管BG1~BG5、脉冲变压器B2等元件组成。电阻R1、稳压器WG1对70V绕组整流电压进行削波处理成梯形波电压,做为触冲功放级BG5、BG3的供电和电网过零同步信号,控制BG5在电网电压过零时处于截止状态;该梯形波直流电压又经D1隔离、C4滤波成平滑和稳定直流电压,用作移相电路的前级信号处理电路¬——BG1放大器的供电,以提高电路工作的稳定性。
R16、WG3对另一70V绕组整流电压,削波生成梯形波直流电压,该电压作为同步采样信号,经DW0、DW1、DW2三只电位器调整后,经R7、BG1的发射结、射极电流负反馈电阻R6、DW3、DW4等元件形成了BG1的Ib回路(或称为基极偏压回路),形成了速度给定信号。DW0、DW2用于用于调速范围的设定,D2、D3、D4三只二极管,起到BG1的be结正反向电压的限幅保护作用,将BG1的最大Ic(即BG2的最大Ib)限制于1.4V(两二极管串联压降)-0.7V(BG1发射结电压)/24kΩ=0.029Ma,从而限制了BG2的最小等效导通Rce电阻,限制了单结晶体管BG3形成直通而停振。串入DW3、DW4、DW5支路的目的,是引入电流、电压反馈信号,形成速度闭环控制及电流保护作用(见下文所述)。
当DW2活动臂上行时→BG1的Ub(Ib)上升→BG2的Ib/Ic上升→BG1的Rce(等效导通电阻)变小→C1上充电电压到达BG3基极峰点电压的时刻提前→BG3的导通提前→(在触发脉冲作用下)两只主电路晶闸管的导通时刻提前→半控桥整流电压升高→直流电机转速升高。
移相信号形成电路的主体为单结晶体管BG3、R3(包括BG2导通时的等效Rce)C1的定时电路所组成的张驰振荡器。BG5为脉冲功率放大电路,将输入移相触冲进行功率放大后,驱动脉冲变压器B2。而BG1、BG2两级放大器,组成了可控的变阻电路(BG2的等效导通Rce电阻),使之对C1的充电是可控的(可以调节RC时间常数),进而控制了张驰振荡器第一个脉冲出现的时刻。
注意:稳压二极管WG1两端形成的梯形波电压,为桥式整流所得的100个波头的削波电压,相邻两个波即对应电网电压的正负两个波,两只晶闸管的栅-阴极得到的实际为100Hz的触发脉冲。在电源L端为正时,触发脉冲同时加到上桥臂与下桥臂晶闸管的栅-阴极,但只有承受正向电压的上桥臂晶闸管受触发导通,而下桥臂晶闸管受反击处于关断状态。同理,当电源L端为负时,触发脉冲也同时加到两只晶闸管上,但下桥臂晶闸管承受正向电压而开通,上桥臂晶闸管受反压并不具备导通条件而关断。脉冲变压器B2二次绕组的两个同名端输出触发脉冲经二极管正向整流后引入晶闸管的栅极,两路触发脉冲其实是同步出现的,并非相差180°输出!
〔过电流保护电路〕电流采样电阻RS、稳压管2CW9、晶体管BG4等组成过电流保护电路。电阻RS(0.1Ω20W)串接于电枢供电回路中,将电枢电流信号转化为电压降信号。RS两端形成的电流采样信号经DW3整定后,加到稳压管2CW9的负极。当因起动或其机械堵转等原因造成电枢电流过大时,DW3的活动臂上输出的电压升高,若升高到2CW9的击穿电压值以上时,稳压管击穿,BG4得到基极偏流饱合导通,C1的充电电压经D10、BG4和100Ω电阻形成放电通路,C1上电压迅速跌落,使主电路的晶闸管趋于关断,输出电压降低,限制了电流的增大。
〔失磁保护电路〕电流继电器的常开触点串于DW1活动臂的输出线上,当励磁电流正常时,LJ得电动作,常开触点吸合,移相电路有给定速度信号。当励磁电路故障,使励磁电流小于某整定值时(调节R17的阻值可整定电流继电器的动作阀值),电流继电器释放,触点断开,BG1的Ib为0,主电路晶闸管关断。
此外,还有下文两个控制环节,电流正反馈电路和电压负反馈支路,两支路信号都由DW4活臂上输出,通过调节BG1的(Ub)Ib大小,控制输出电压(输出转速)的稳定。将BG1的Ib回路重画一下,可看出速度给定信号和电流、电压反馈信号对Ib的影响。见下图2。

上图中的a、b两点之间电压为U控(BG1的基极偏置电压),调节转速给定电位器DW1时,U控电压相应变化,从而控制了Ib的大小。BG1的Ib回路:U控+端经R7、BG1的be结、R6、DW4、R14、DW5回到U控-端。当U控为固定值时,电枢A1、A2端电压下降时,DW4活动臂上分压减小,从而使R7、BG1的Ube分压上升,Ib增大。反之,A1、A2端电压的上升,使Ube下降,Ib减小;当电枢电流增大,DW5上分压上升,使DW4上分压降低,使Ube上升,Ib增大。正常运行时,当U控为某一调节后固定值,电流与电压反馈信号改变了BG1的Ib值的大小,实现了负反馈闭环稳速控制。
〔电流正反馈电路〕闭环调节电路之一,实质也为稳速控制。直流电机拖动负载以后,转速相应下降(电枢端电压下降),输出电流有所增大,若欲维持给定转速,即需相应升高输出电压。电枢电流上升时→电位器DW5分压值上升→DW4上分压值减小→BG1的Ube上升→BG2的等效导通Rce电阻减小→C1充电速度加快→触发脉冲出现时刻提前→晶闸管导通角增大→输出电压升高→负载转速上升。于是电机的输出特性曲线保持平坦(机械特性曲线硬度提高)。
〔电压负反馈电路〕闭环调节电路之二,稳定输出电压。当电机加载时,引起电枢端电压降低,电机转速下降→DW4上分压值减小→BG1的Ube上升→BG2的等效导通Rce电阻减小→C1充电速度加快→触发脉冲出现时刻提前→晶闸管导通角增大→输出电压升高→负载转速上升。实现了稳压(稳速)输出控制。
注意:在电路调整过程中电流反馈与电压反馈量调节不当,会出现振荡现象(转速忽高忽低变化),要防止片面领导追求机械特性的硬度,因而将电流正反馈信号取得过大而引起机械振荡。
具体调试步骤如下:
1)将电压反馈信号电位器DW4往增大方向(4-11图中看,使其活动臂向上)调节,约调到4/5处,将电流反馈信号电位器调减小方向调节(从4-11图中看,使其活动臂向左),约调到4/5处;
2)将转速给定电位器DW1调到低速位置(从4-11图中看,使其活动臂向下),调整完毕后起动电动机;
3)然后缓慢将转速给定电位器调至全速位置,看转速是否能达到额定值。如达有到全速运行,将DW4调小,直到能全速运行为止;
4)将静态特性调整在10﹕1的调速范围内,并调整DW2使DW1在零速位置时,电机转速为零;
5)为电机加载,调节电流反馈信号电位器WD5,直到转速变化达到5%的硬度时为止。如单纯调节DW5达不到要求时,应配合调节DW0、DW4,适当增加给定信号比例和电压负反馈比例,使电机在高速运行时,也能达到5%的硬度。
旷野之雪 2010年7月26日星期一
最后修改:2010/7/31 7:34:58